Robototexnika robotların öyrənilməsi, robotlar isə müəyyən vəzifələri yerinə yetirən elektromexaniki maşınlardır. Robotların bir çoxu vəzifələrini yerinə yetirən zaman insan əməyinə ehtiyac duyduğu halda bəziləri tapşırığı özləri yerinə yetirə bilirlər. Məhz bu tip robotlar Avtonom robotlar adlanır.
Avtonom robotlar nədir ?
Nəzəri olaraq, Avtonom robotlar kiçik tapşırıqları yerinə yetirmək üçün proqramlaşdırılmış, insanın xaricdən təsiri olmadan və ya insanla qarşılıqlı əlaqəsi olmayan cihazlardır. Onlar robot proseslərinin avtomatlaşdırılmasından süni intellektə malik uçan nəqliyyat vasitələrinə qədər ölçü, funksionallıq, hərəkətlilik, çeviklik, zəka və qiymət baxımından əhəmiyyətli dərəcədə fərqlənə bilər. Avtonom robotlar ətrafdakıları tanıyıb öyrənə və müstəqil qərarlar qəbul edə bilirlər. Başqa sözlə, onlar olduqca unikaldırlar, çünki ətrafdakı dünyanı dərk etmək üçün sensorlardan istifadə edirlər və sonra öz məlumatlarına və tapşırıqlarına əsaslanaraq optimal növbəti addımı atmaq üçün qərar qəbuletmə strukturlarından istifadə edirlər. Avronom robotlara nümunə: Təmizləmə robotları (məsələn, Roomba), Ağac Budama Robotları , Avtonom dronlar, Tibbi köməkçi robotlar və s.
Yerinə yetirdikləri vəzifəyə görə Avtonom robotların növləri:
Əməkdaşlıq Robotları
Ən geniş yayılmış avtonom mobil robotlardan (AMR) biri Əməkdaşlıq Robotlarıdır. Bunlara nümunə olaraq Fetch Robotics , Otto Motors və GreyOrange şirkətlərinin istehsal etdiyi robotları göstərə bilərik. Bu proqramlaşdırıla bilən robotlar yerləşdirmə, toplama, sayma, doldurma və çeşidləmə proqramlarında işləmək üçün qurulub.
Şəkil 1. GreyOrange anbar robotu
Avtonom İnventar Robotları
Şəkil 2. Fetch Robotics şirkətinin istehsal etdiyi çatdırılma robotu
Bu tip proqramlaşdırıla bilən robotlar bir inventar seçir və işçi bir yerdə qaldığı halda digər işçiyə məhsul rəfləri gətirir.
Avtomatik idarə olunan nəqliyyat vasitələri Bunlara, ən çox yayılmış Forkliftləri misal göstərə bilərik. Öz özünü idarə edən Forkliftlərin əsas istehsalçısı Linde Material Handling şirkətidir. Onlar yükdaşıma prosesləri zamanı əlavə dəyər tələb edən, təkrarlanan və daha uzun məsafələri əhatə edən əməliyyatlar üçün çox uyğundur. Linde-nin avtomatlaşdırılmış forkliftlərində naviqasiya lazeri, ön və arxa skanerlər, 3D kamera və insan işçilərin yaxınlığındakı anbar ətrafında təhlükəsiz hərəkət etməyə imkan verən vizual və akustik xəbərdarlıq göstəriciləri var.
Şəkil 3. Qrup şəklində idarə olunan avtonom forklift
Avtomatik idarə olunan nəqliyyat vasitələrinin əsas çatışmazlığı onların işləmə sürətidir. Çoxsaylı təhlükəsizlik xüsusiyyətlərinə görə, onlar orta hesabla 2 km/saat sürətlə hərəkət edir, orta operator isə uzun qaçışlar zamanı 15 km/saat sürətlə hərəkət edir.
Üsünlükləri : 1.Yüksək avtonomluğa malikdirlər. Avtonom mobil robotların ən böyük üstünlüklərindən biri onun avtonom olmasıdır, yəni o, olduğu mühiti təkbaşına skan edib, maneələri aşkar edə bilir. Məsələn, tam bir trayektoriya əvəzinə robota başlanğıc və son nöqtə verilir, bunun üzərində robot öz yolunu yaradır, skan edir və yoluna çıxan hər şeydən qaçır. 2.Çevikliyi AMR-nin A nöqtəsindən B nöqtəsinə gedərkən xüsusi marşrutu izləməsinə ehtiyac yoxdur. Maqnit lenti və ya naqili izləyən avtonom nəqliyyat vasitələrdən fərqli olaraq, AMR-lər öz marşrutlarını yaradır və maneələrdən qaçırlar. Bu, AMR-lərə yeni tapşırıqlar verilməsi baxımından daha çevik olması deməkdir. Onlar dah asanlıqla yeni marşrutlar və ya yeni vəzifələr üçün yenidən proqramlaşdırıla bilər.
Müxtəlif tutacaqlar və ətrafların quraşdırıla bilməsi Robota qaldırıcılar, konveyerlər, tutucular, qarmaqlar və ya birgə robot kimi müxtəlif üst modullar quraşdırıla bilər. Bu da robotun müxtəlif vəzifələri yerinə yetirə bilməsində səmərəli rol oynayır.
Çatışmamazlıqları : 1.Yük tutumunun az olması AMR-lərin əsas çatışmazlıqlarından biri onların yük tutumunun məhdudlaşdırılmasıdır. Mobil robotlar 1 tona qədər yük qaldıra bilirlər. 2.Təhlükəsizlik riskləri yarada bilər AMR-dən istifadə zamanı bir sıra təhlükəsizlik problemləri yarana bilər. Məsələn, onlar həddən artıq yüklənməməlidirlər, xüsusən də yük böyükdürsə. Təcili əyləc zamanı yük düşə və işçinin xəsarət almasına səbəb ola bilər. 3.AMR-lərin olduğu mühitə qoyulan tələblərin çox olması AMR-lərin işçi sahəsinə qoyulan bir sıra tələblər: döşəmələr çox qeyri-bərabər olmamalıdır və bir səthdən, hündürlükdən və s. digərinə hər keçid nəzərə alınmalıdır . Ətraf mühit çox tozludursa və ya çox buxar varsa, AMR düzgün hərəkət edə bilməyəcək, çünki onun sensorları narahat olacaq. Həmçinin tunellərdə çox dar yollar və dönüşlər də AMR-lərin istifadəsini çətinləşdirəcək.
Xülasə. Məqalədə günümüzdə bir çox sahələrdə tətbiq olunan avtonom mobil robotlara, onların digər robotlardan fərqləndiyi xüsusiyyətlərinə, müsbət və mənfi cəhətlərinə, tətbiq sahələrinə nəzər salınmışdır. Avtonom robotların anbarlarda, logistika və s. sahələrdə tətbiq olunması insan əməyinin azalmasına, daha az vaxt ərzində daha çox tapşırığı yerinə yetirilməsinə şərait yaratdı.
Kiborq (ingiliscə: Cyborg = “kibernetik orqanizm”) bioloji və süni (məsələn, elektron, mexaniki və ya robotik) hissələri olan varlıqlara verilən addır. Kibernetik orqanizm termininin abreviaturasıdır. 1960-cı ildə Amerika alimləri Manfred Clynes və Nathan S. Kline tərəfindən irəli sürülən bu termin ikilinin kosmosda özünü təşkil edən insan-maşın sistemlərinin üstünlüklərini təsvir etdiyi məqalədə istifadə edilmişdir.
Adi tərifə görə, kiborq üzvi və mexaniki bədən hissələrini birləşdirir. Ancaq bəzi elm adamları bu anlayışı genişləndirirlər. Bunlara koxlear implantları, kardiostimulyatorları və ya hətta kontakt linzaları olan insanlar daxildir.
Kiborqların formalaşması mərhələləri
Kiborqlar haqqında kitabları olan yazar Chris Hables Grey, siborg termini ilə bağlı aşağıdakı açıqlamaları verir:
Cyborg texnologiyaları: Onlar bərpaedici ola bilər, çünki itirilmiş orqan və əzaları əvəz edir, yəni itirilmiş funksiyaları bərpa edir. Onlar normallaşdırıcı ola bilər, çünki onlar müəyyən canlıları normal vəziyyətinə qaytarır. Kiborqlar gələcəkdə insanların kosmosda sağ qalmaq üçün keçməli olduğu dəyişikliklərə kömək etməklə insan irqini yenidən qura bilər. Tibbdə texnoloji yeniliklər artdıqca, bədənimizi maşınların köməyi ilə hər zamankindən daha təkmilləşdirmək daha adi hala çevriləcək. Gələcəkdə, insan tamamilə sağlam olsa belə, insanların çoxunun daha sürətli və daha güclü olduğu bir dünyada, onlar kiborq formasiyalarına müraciət edə bilərlər. Bu məqamda bizi nəyin insan etdiyi və kiborqların əmələ gəlməsinin sərhədlərinin harada olduğu ilə bağlı etik və fəlsəfi suallar yaranır.
İlk Cyborg İnsan Neil Harbisson
Rəng korluğu olan Neil Harbisson bu problemi həll etmək üçün kəlləsinə antena yerləşdirərək dünyada hökumət tərəfindən tanınan ilk kiborq oldu. Eyeborg antenası baş dərisinə bərkidilmiş və USB portu olan çipdən ibarətdir. Elm adamları ilə illərlə inkişaf etdirdikdən sonra cihaz Neil Harbisson üçün hazır idi. Eyeborg beyinə rənglər haqqında bildirişlər göndərməklə yanaşı, zənglərin, videoların, şəkillərin və musiqilərin qəbulunda da rol oynayır.
Claudia Mitchell
Mitchell bionik qolu olan ilk qadındır və sadalanan halların əksəriyyətində olduğu kimi, onun kiborq həyatına çevrilməsi də qəza nəticəsində baş verib. Dörd il Dəniz Piyadaları Korpusunda çalışsa da, qolunu hərbi xidmət zamanı yox, motosiklet sol qolunu tamamilə itirib qəzasında itirdi. O, bir neçə qəzetə bionik qolunu almadan əvvəl iki ayağı və bir əli ilə banan qabığını soyduğunu söylədi. Robot üzv, Cessi Sullivanda olduğu kimi Çikaqo Reabilitasiya İnstitutundan gəlir və 3 milyon dollara hazırlanıb. O, ilk dəfə bir əli ilə bananın qabığını soyanda ağlamışdı.
Cyborg insandır, yoxsa maşın?
Texnologiyalar hər gün daha da inkişaf edir. İnsanlar gündəlik həyatında texnologiyadan asılıdır. Kiborqlar iyirmi birinci əsrdə çox yaygındır. Bəzi suallar kiborq insan yoxsa maşındır. Bu mövzuda araşdırmalar apararaq kiborq insan deyil. Cyborg, fiziki qabiliyyətlər üçün bədənə daxil edilmiş mexaniki elementlərdir. Məsələn, insanlar əlillərin yenidən insan kimi fəaliyyət göstərməsinə kömək etmək üçün kiborqdan istifadə edirlər. Bu, bədəninin əhəmiyyətli bir hissəsini mexaniki robot hissələri ilə əvəz edən bir insana aiddir. O, sosial reallığın və fantastikanın məxluqudur. Cyborg insanın nəfəs almasına, qan pompalamasına və işləməsinə kömək edir. Kiborgla robot arasındakı əsas fərq həyatın mövcudluğudur. Robot əsasən çox inkişaf etmiş bir maşındır. Çox vaxt avtomatlaşdırılmışdır və insanlarla çox az qarşılıqlı əlaqə tələb edir. Müqayisə üçün kiborqlar canlı orqanizm və maşının birləşməsidir. Ciborqu robotdan ayıran canlı komponentdir. Bu o deməkdir ki, robot yoxdursa kiborq yaşayır. Bəzi robotlar canlıların müəyyən aspektlərini simulyasiya edə bilsələr də, o, heç vaxt canlı deyil. Bir robot yalnız kiborq, xüsusən də insan kiborqları öz fəaliyyətlərində sərbəst iradə nümayiş etdirərkən proqramlaşdırılmış şeyi edə bilir.
Cyborg və Bionik sistem
Cyborg və bionik sistemlər (CBS) bəzi süni komponentləri və ya bio-hibrid aktuatorlar və sensorlar kimi texnologiyanı birləşdirən orqanik və biomexatronik bədən hissələrinin hibrid birləşməsinə aiddir. Orqanizmi orijinal bioloji xüsusiyyətlərindən kənarda bərpa etmək və ya gücləndirmək məqsədi daşıyır. Orqanizm təkcə insanları deyil, həm də heyvanları və hər hansı digər canlıları nəzərdə tutur. Tipik bir nümunədə, süni ürək stimulyatoru və ya implantasiya edilə bilən kardioverter-defibrilatoru olan bir insan CBS-dən biri hesab olunur. Belə cihaz bədəndəki gərginlik potensialını ölçdüyündən, siqnalın işlənməsini həyata keçirdiyindən və insanı sağ saxlamaq üçün əks əlaqə mexanizmindən istifadə edərək elektrik stimulları ötürdüyündən.
CBS geniş şəkildə tətbiq edilmişdir:
karbon nanoborucuqları və/yaxud göbələk hüceyrələri ilə strukturlaşdırılmış bəzi toxumaları təmin etməklə toxuma mühəndisliyi,
süni ətraflar və birbaşa beyin implantları kimi fərdi reabilitasiya müalicəsi,
neyro-nəzarət,
daha böyük rabitə və nəzarət şəbəkələri. Bionik texnologiya və nanotexnologiyanın sürətli inkişafı ilə bir çox tədqiqatçılar CBS-nin insana xəstəlik, sürət, güc və zəka kimi bir çox məhdudiyyətləri dəf etməyə kömək edə biləcəyini düşünürlər.
Məqsədlərə və tətbiqlərə nail olmaq üçün bizə orqanizmin mexanizmi, bioloji uyğun materiallar, məlumatların qavranılması və birləşmə, implantların idarə edilməsi haqqında aydın anlayış lazımdır. Buna görə də, hüceyrə biologiyası, bərpa və regenerasiya təbabəti, bionik mexanika, robototexnika, nanotexnologiya, materialşünaslıq, biomexaniki interfeys texnologiyası və s. kimi multidisiplinar nəzəriyyə və texnologiya stimullaşdırılıb və inteqrasiya olunub.
İnsanı kiborq edən nədir?
Bir tərif kiborqu bədəninə texnologiya implantasiya etmiş biri kimi təsvir edir – cərrahi müdaxilə olmadan çıxarıla bilməyən implant. Başqa, daha az sərt tərif kiborqu texnologiya vasitəsilə bacarıq və hisslərini genişləndirən biri kimi təsvir edir.
Gündəlik həyatımızda – məktəbdə, işdə, evdə bizi çoxlu sayda texniki qurğular əhatə edir: televizor, paltaryuyan maşın, mobil telefon, kompüter avadanlığı və daha çox. Ancaq təxminən 30-40 il əvvəl insanlar televizorsuz işləyirdilər və yalnız məktublar və teleqramlar məlumat ötürmək üçün yeganə yol idi. Elm ildən-ilə inkişaf edir, araşdırmalar yerində dayanmır. Getdikcə daha çox yeni texnologiyalar icad edilir. Bu gün robotlar müxtəlif sahələrdə həyatımıza daxil olub. Onlar kosmosa uçur, başqa planetləri araşdırırlar; hərbi məqsədlər üçün yardım – bombaların minalardan təmizlənməsində və havadan vəziyyətin kəşfiyyatında iştirak edirlər. Sənayedə bir çox sahələr artıq robotlarsız ağlasığmazdır: onlar maşın yığır, yeni dərmanların tapılmasına kömək edirlər. Robotlar və robot texnika haqqında məlumatların toplanması sizə üfüqlərinizi genişləndirməyə, müxtəlif modifikasiyalı robotların yığılması üzrə bacarıq və praktiki vərdişlərə yiyələnməyə imkan verəcək və texniki özünütəhsil imkanı verəcək. Məqsəd robototexnikanın sadəcə bir oyun deyil, gələcəkdə peşəyə çevrilə biləcək ciddi bir məşğuliyyət ola biləcəyini sübut etməkdir. Həm də – uşaqların elmi-texniki yaradıcılığa, texnologiyaya, yüksək texnologiyalara marağını cəlb etməkdir.
1920-ci ildə “robot” sözünü ilk dəfə çex yazıçısı Karel Çapek və onun qardaşı Yozef icad edib və ilk dəfə Capekin “R.U.R.” pyesində işlədilib (“Rossumun Universal Robots”). O, pyesində fabrikdə robotların özləri tərəfindən yığılması prosesini təsvir edirdi. Çex dilində “robota” ağır iş, cəzalı qulluq deməkdir. Tamaşanın qəhrəmanı mühəndis Ross insanın bütün işlərini yerinə yetirə bilən mürəkkəb maşın ixtira etməyi bacarıb. Müəllif bu insanabənzər maşını “robot” adlandırıb. Robotlar insanla tam xarici oxşarlığa malik idi və istənilən işi yerinə yetirə bilirdi. Onlara tələbat o qədər böyük idi ki, zavod tezliklə onların kütləvi istehsalına keçdi. Robotların sahibləri onları fabrik və fabriklərdə canlı insanlarla əvəz etməyə başladılar. Lakin bir gün robotlar insanlara hücum edərək hamısını öldürdülər. Yer üzündə insanlar yox oldu və onların yerini ağıllı avtomatlar aldı… Robotlar haqqında ilk tamaşanın belə sonluğu ilk tamaşaçıların ruhunda dərin iz buraxdı və uzun onilliklər ərzində cəmiyyətin onlara qarşı mənfi münasibətini formalaşdırdı. Bununla belə, texnologiya inkişaf etməyə davam etdi və insanlar emosiyalarından asılı olmayaraq robotlar yaratmağa davam etdilər. Robotlar insanların mexaniki köməkçiləridir, onlara daxil edilmiş proqrama uyğun olaraq əməliyyatları yerinə yetirməyə və ətraf mühitə cavab verməyə qadirdirlər. Bir çox fərziyyələrdən sual yaranır – ilk robot nə vaxt icad edilib? Belə çıxır ki, robotların yaradılması haqqında ilk fikirlər bizim eramızdan əvvəl yaranıb: 3-cü minilliyin ortalarında misirlilər “təfəkkür maşınları” ixtira ediblər – kahinlər proqnoz vermək və məsləhət vermək üçün heykəllərin içərisində gizləniblər. 19-cu əsrin 50-ci illərində, təxminən 1495-ci ildə Leonardo da Vinçi tərəfindən hazırlanmış insanabənzər robotun rəsmləri tapıldı. Rəsmdə otura bilən, qollarını açan, başını hərəkət etdirən, çənələrini açıb bağlaya bilən mexaniki cəngavər ətraflı şəkildə göstərildi. Onun planlarına görə, əllərin işi sinədə olan mexaniki proqramlaşdırıla bilən cihaz tərəfindən idarə edilməli, ayaqlara birləşdirilmiş kabeli hərəkətə gətirən tutacaqdan istifadə edilərək idarə edilməli idi. Sənaye robotları meydana çıxmazdan əvvəl robotların insanlara bənzəməsi lazım olduğuna inanılırdı.
Fransız mexaniki və ixtiraçısı Jak de Vaukanson 1738-ci ildə yeriyə, qanadlarını hərəkət etdirə, şırıldaya, su içə və taxıl dərə bilən həqiqi tüklərlə örtülmüş mexaniki ördək yaratdı.. İsveçrəli saat ustası Pierre-Jacques Droz 1770-ci ildə Scribe maşınını yaratdı. Bu, masa arxasında oturan, hərfləri, sözləri səliqəli əl yazısı ilə yazan, hətta it çəkə bilən bir qızdır. Eyni zamanda yavaşca başını buladı və əlinin hərəkəti ilə zamanında göz qapaqlarını aşağı saldı.
Rus mexanikləri də kənarda durmadılar. İvan Petroviç Kulibin 1769-cu ildə üç il ərzində bir yumurta fiqurunu – universal saat qurdu. Saat teatrlaşdırılmış tamaşa göstərdi, musiqi çaldı. İlk robotlardan biri 1925-ci ildə amerikalı mühəndis Uensli tərəfindən yaradılmışdır. Müəllif ona cənab Televox adını verib. Uenslidən bu qəribə adın haradan gəldiyini soruşduqda o, belə cavab verdi: “Tele” sözünün birinci yarısı yunancadır və “uzaq”, ikincisi-“vox”-latın və “səs” deməkdir. Adımla robotumun insan 2 səsi ilə verilən əmrlərə cavab vermə qabiliyyətini vurğulamaq istədim”. Zahirən, cənab Televox o qədər də cəlbedici deyildi: göz və ağız yerinə bir növ düzbucaqlı olan kvadrat baş, burun yerinə qadın saç sancağı, içərisində məftil və mexanizmlərin mürəkkəb bir-birinə qarışdığı açıq taxta gövdə və nəhayət, gülünc qollar və ayaqlar. Televox fit səslərinin köməyi ilə insan tərəfindən verilən bir neçə müxtəlif əmrləri eşitmək və yerinə yetirmək qabiliyyətinə malik idi. Uensli fərqli sayda təkrar fit çalmaqla robotu pəncərələri açmağa, qapını bağlamağa, ventilyatoru və tozsoranı işə salmağa və otaqda işığı yandırmağa məcbur edə bilərdi. Televox təkcə eşidən və danışan robot deyildi. Ev işçisini əvəz edərək bəzi ev işlərini görə bilərdi. Fısıltıların köməyi ilə siz müvafiq əmr verə bilərsiniz və mexaniki qulluqçu axşam yeməyini qızdıracaq. O bunu necə edəcək? Çox sadə. Evdən çıxarkən, sahibə yemək olan qazan və tavaları elektrik sobasına qoymalıdır. Televox daha sonra elektrik şəbəkəsindəki sobanı müstəqil olaraq yandıracaq.
Tezliklə cənab Televoxun qardaşları oldu. Bunlardan birincisi 1928-ci ildə ingilis mühəndisi Riçards tərəfindən qurulan robot Erik idi. Bu robot 1928-ci il sentyabrın 15-də Londonda Mühəndislər Cəmiyyətinin illik sərgisinin açılışında ictimaiyyət qarşısında çıxış etdi. O, ötən ilin yekunlarına dair çıxış edib. Erik İngiltərənin bir çox başqa şəhərlərində nümayiş etdirildi. Sənaye robotları ilk icad edilmişdir. 1980-ci ildə SSRİ Robototexnika və Texniki Kibernetika Mərkəzi Tədqiqat və İnkişaf İnstitutunu (TsNII RTK) yaratdı və mövqeyə nəzarət edən ilk pnevmatik sənaye robotu MP-8 ixtira etdi.
Robot texnikasının başlanğıcında istedadlı insanlar dayanırdı. Slavyanşünaslıq professorunun oğlu, Rusiya əsilli Norbert Viner 18 yaşında Harvard Universitetində fəlsəfə doktoru dərəcəsi almışdır! Norbert Vinerin “Mən riyaziyyatçıyam” kitabının ortaya çıxması bütün dünyanı güclü partlayış kimi sarsıtdı. Məhz o, yeni bir elmin – KİBERNETİKANIN doğulduğunu elan etdi. Wiener generalist idi. Robot sözü həyatımıza möhkəm daxil olub. Azyaşlı uşaqlar üçün təkcə oğlanların deyil, qızların da zövqlə oynadıqları çoxlu robot oyuncaqlar yaradılmışdır. Elektronikanın sərgüzəştlərindən bəhs edən filmə kim baxmayıb! Birdən çox uşaq nəsli bu filmin qəhrəmanlarının gülməli macəralarından xəbərdar olaraq böyüyüb və indi televizorları yandırmaqla çoxları maraqlı filmə baxa biləcəklər. “Robotexnika” termini nə deməkdir? – Robototexnika (robot və texnologiyadan; ingilis robot texnikası) avtomatlaşdırılmış texniki sistemləri inkişaf etdirən elmdir. Robototexnikanın öz qanunları var. Onlar amerikalı fantastika yazıçısı İsaak Asimov tərəfindən icad edilmişdir. Robot texnikasının əsas qanunları:
Robot insana zərər verə bilməz.
Robot insan əmrlərinə tabe olmalıdır.
Robot öz təhlükəsizliyinin qayğısına qalmalıdır.
Müasir robot texnikası kompüter texnologiyasına əsaslanır. Sənaye robotları bu gün mövcud olan bütün cihazların 80%-dən çoxunu təşkil edir. Onlar bir çox fabriklərdə bir insanı demək olar ki, tamamilə əvəz edə bilirlər: mexaniki “işçilər” səhv etmirlər, yorulmurlar, onlara əmək haqqı vermək lazım deyil. 1966-cı ildə Shakey robotu meydana çıxdı – öz hərəkətləri haqqında düşünməyə qadir olan ilk universal mobil robot. Dante II robotu olmasaydı, insan heç vaxt aktiv vulkanın kraterinə baxmazdı. Sojourner robotu olmasaydı, Mars haqqında məlumatımız daha məhdud olardı. Bu qurğu 1997-ci ildə planetin səthinə endi və çoxlu sayda fotoşəkilləri Yerə ötürdü. Ev robotları ekstremal şəraitə uyğunlaşdırılmayıb. Onların vəzifəsigündəlik həyatda bir insana kömək etmək və onu əyləndirməkdir. Çox sayda ucuz ev robotları var: tozsoran robotları, otbiçən robotlar. NEC-in PaPeRo robotu sırf gündəlik funksiyalardan əlavə danışa bilir. Bu robot 300 dən çox ifadəni bilir və daha çoxunu tanıyır. Ancaq ən çox Sony-nin inkişafı bunu bacarır – it Aibo (yap. 愛慕 aibo “sevgi” deməkdir). Ustadını tanımağı, əmrlərə cavab verməyi, məhəbbətlə davranmağı bacarır. Aibonun dörd böyümə mərhələsi var: körpəlik, uşaqlıq, yeniyetməlik və yetkinlik. Köpək qaça, tullana, uzana, futbol oynaya və rəqs edə bilər.
Əyləncə üçün robotlar var. Hər il sadələşdirilmiş qaydalara uyğun olaraq futbolda robotların turniri keçirilir. Həmçinin robotlar şahmat oynaya bilir. Dünya çempionu Qarri Kasparov şahmat duelində robota uduzub. Robototexnika tətbiq olunur:
Elastik nanoborular. Bu inkişafın erkən mərhələsində perspektivli eksperimental texnologiyadır. Nanoborularda qüsurların olmaması lifin bir neçə faiz elastik deformasiyasına imkan verir. İnsan bicepsini bu materialdan 8 mm diametrli bir məftillə əvəz etmək olar. Belə yığcam “əzələlər” gələcəkdə robotlara insanı ötüb keçməyə kömək edə bilər. Bu mövzuda ədəbiyyatın öyrənilməsi, görülən əməli işlərin nəticəsi olaraq belə qənaətə gəlinmişdir ki:
sənayedə;
kənd təsərrüfatında;
nəqliyyat və maşınqayırma sahəsində;
tibbdə;
tədqiqat işində;
kosmosda. Bəşəriyyətin insan köməyi olmadan idarə edə bilən robotlara böyük ehtiyacı var:
yanğınları söndürmək,
təbii fəlakətlər zamanı xilasetmə işlərini yerinə yetirmək,
atom elektrik stansiyalarında qəzaların aradan qaldırılması,
terrorizmlə mübarizədə. Yapon ustaları heç vaxt xoş yenilikləri ilə heyrətləndirməkdən əl çəkmirlər. Yeni robot ayı insanları qucağında daşıyır. Əksər robotların bədəni ayrı-ayrı hərəkət edən və sabit hissələrdən ibarətdir. Əsas olanlar bunlardır: Daxili nəzarətçi. Hər bir robot nəzarətçi – kompüter əməliyyat sistemi ilə təchiz edilmişdir. Nəzarətçi istənilən robotun beynidir. Tapşırıqları və təlimatları yerinə yetirmək üçün lazım olan bütün məlumatları ehtiva edir. Enerji mənbəyi. Robotların güc mənbəyinə ehtiyacı var. Bəziləri batareya ilə işləyir. Digərləri günəş işığını enerjiyə çevirən günəş batareyaları ilə təchiz edilmişdir. Mexanik robotlar yay mexanizmi ilə bağlanır. Uzaqdan nəzarət. Rover kimi digər planetlərdə işləyən robotlar daxili kontrollerlərlə təchiz olunub, lakin onları Yerdən də idarə etmək olar. Şəkillərə əsasən operator robotun hara hərəkət etməli olduğunu və hansı tapşırığı yerinə yetirməli olduğunu müəyyənləşdirir. İşıq və səs sensorları. Onların köməyi ilə robot cisimlərdən gələn işığı tanıya, səs dalğalarını təyin edə bilər. Bu funksiya ya müxtəlif obyektləri yan keçməyə və ya onlara doğru getməyə kömək edir. Həmçinin robotun gövdəsinə səsin tanınması cihazı quraşdırıla bilər ki, onun köməyi ilə şəxs maşına şifahi əmrlər verir. Təzyiq Sensorları. Bəzi robotlar toxunma hissini təqlid edən təzyiq sensorları ilə təchiz edilmişdir. Bu sensorlar ümumiyyətlə iki məqsədə xidmət edir. Onlar robota onun obyektə dəydiyini və istiqamətini dəyişməli olduğunu bildirir, həmçinin ona obyekti düzgün tutmağa və qaldırmağa imkan verir. Robot komponentləri: Step Motorlar. Adından da göründüyü kimi, pilləli mühərriklər DC mühərrikləri kimi sərbəst fırlanmır. Onlar nəzarətçinin nəzarəti altında müəyyən bucaq altında addım-addım fırlanırlar. Bu, bir mövqe sensoruna ehtiyacı aradan qaldırır, çünki dönüşün edildiyi bucaq nəzarətçiyə məlumdur; buna görə də belə mühərriklər tez-tez bir çox robotların və CNC maşınlarının ötürücülərində istifadə olunur. Piezo mühərrikləri. DC mühərriklərinə müasir alternativ, ultrasəs mühərrikləri kimi də tanınan piezo mühərriklərdir. Onların iş prinsipi çox orijinaldır: saniyədə 1000 dəfədən çox tezlikdə titrəyən kiçik piezoelektrik ayaqları motoru dairə və ya düz xətt üzrə hərəkətə gətirir. Belə mühərriklərin üstünlükləri yüksək nanometr ayırdetmə qabiliyyəti, sürət və gücdür, ölçüləri ilə müqayisə olunmazdır. Piezo mühərrikləri artıq ticari olaraq mövcuddur və bəzi robotlarda da istifadə olunur. Hava əzələləri. Hava əzələləri dartma təmin etmək üçün sadə, lakin güclü bir cihazdır. Sıxılmış hava ilə şişirdildikdə, əzələlər uzunluğunun 40%-ə qədər yığıla bilər. Bu davranışın səbəbi, əzələlərin ya uzun və nazik, ya da qısa və qalın olmasına səbəb olan kənardan görünən toxumadır. Onların iş üsulu bioloji əzələlərə bənzədiyi üçün onlardan heyvanlarınkinə bənzər əzələ və skeletlərə malik robotlar istehsal etmək üçün istifadə oluna bilər. Elektroaktiv polimerlər. Elektroaktiv polimerlər elektrik stimullaşdırılmasına cavab olaraq formasını dəyişən bir plastik növüdür. Onlar əyilə, uzana və ya büzülə biləcək şəkildə dizayn edilə bilər. Bununla belə, hazırda kommersiya robotlarının istehsalı üçün uyğun olan EAP-lar yoxdur, çünki onların bütün mövcud nümunələri səmərəsiz və ya kövrəkdir
Bu gün robototexnika tamamilə bütün sahələrdə və peşələrdə istifadə olunur və bəlkə də gələcəkdə robotlar ümumilikdə insanların bir çox peşələrini əvəz edəcək.
Robotların bir neçə növü var:
Birinci nəsil robotlar müəyyən bir əmri yerinə yetirmək üçün nəzərdə tutulmuş proqramla idarə olunan robotlardır.
İkinci nəsil robotlar çox sayda sensordan istifadə edərək xarici mühit haqqında məlumat toplamaq üçün nəzərdə tutulmuş “hiss” və ya sensor robotlardır.
Üçüncü nəsil robotlar intellektual problemləri həll etmək üçün nəzərdə tutulmuş ağıllı robotlardır. Onlar funksiyalarının mürəkkəbliyi və süni intellektin elementlərini özündə birləşdirən idarəetmə sisteminin mükəmməlliyi ilə ikinci nəsil robotlardan əsaslı şəkildə fərqlənirlər. İstifadə sahəsinə görə robotlar növlərə bölünür:
sənaye,
məişət,
tibbi,
təhsil,
hərbi,
təhlükəsizlik robotları,
biorobotlar,
robot oyuncaqlar,
nanorobotlar,
həmçinin androidlər və kiborqlar Lego proqramlaşdırmanı mənimsəməyə kömək edir. Əsl alim və mühəndislər robotların yaradılması üzərində işləyirlər, lakin hər bir tələbə onu yığıb proqramlaşdıraraq asanlıqla öz robotunu tapa bilər. Rusiya Federasiyasının Baş Naziri Dmitri Medvedevin dediyi kimi: “Artıq məktəbdə uşaqlar öz qabiliyyətlərini üzə çıxarmaq, yüksək texnologiyalı rəqabətli dünyada həyata hazırlaşmaq imkanı əldə etməlidirlər”. Araşdırmam zamanı robot düzəltməyin çox maraqlı, həyəcanlı və öyrədici bir proses olduğunu göstərmək istədim. Gələcəkdə xəstələrə kömək etmək üçün köməkçi robotlar qurulmasını istərdim. Müxtəlif ölkələrdə doğuşdan yeriyə bilməyən çoxlu uşaq var. Kor uşaqlar da var. Onların hamısının robot köməkçilərə ehtiyacı var. Xəstə əl və ayaqlara kömək etmək üçün onlara bioprotez robotlar lazımdır. Belə olur ki, uşaqlar qollarını və ya ayaqlarını sındırır, əzələlərə və oynaqlara zərər verirlər. Robot təlimçiləri onlara kömək edə bilər. Bələdçi robotlar kor insanlar üçün hazırlana bilər. Ümumiyyətlə, insanların özlərini sağlam hiss etmələrinə kömək edəcək robotlar hazırlanmasını istərdim. Robototexnika kompüter elmləri, riyaziyyat, texnologiya, fizika və yaradıcılıq bacarıqlarını inkişaf etdirir. Bir çox məktəblərdə bu istiqamət artıq əlavə siniflər kimi peyda olur, amma məncə hər məktəbdə belə bir fənn tətbiq olunmalıdır, bu çox faydalıdır, çünki ölkəmizin gələcəyi mühəndislərə, proqramçılara, texnoloqlara məxsusdur. Robototexnika öz texnoloji rəqabət qabiliyyətinə, vətəndaşlarının sağlamlığına, həyatlarının təhlükəsizliyinə və rahatlığına əhəmiyyət verən bütün ölkələrdə son dərəcə intensiv inkişaf edən elm tutumlu mühəndislik sənayesidir. Gec-tez robototexnika, yəni robotlar bütün bəşəriyyətin həyatının ayrılmaz hissəsinə çevriləcək. Elmin özü intensiv templə inkişaf edir, hər dəfə robotların inkişafına təkan verən daha çox yeni texnologiyalar meydana çıxır və bu, onları getdikcə daha çox təkmilləşdirməyə və həyatımıza getdikcə daha çox daxil olmağa aparır. İstinadlar:
Макаров И. М., Топчеев Ю. И. Робототехника: История и перспективы. — М.: Наука; Изд-во МАИ, 2003.
Детская энциклопедия. Техника будущего., М; изд.Литера, 2007 г.
http://roboreview.ru/nauka-o-robotah/istoriya-razvitiya-robototehniki.html – история развития робототехники
http://robot-ex.ru/ru/newscontent/razvitie-robototehniki-v-budushchem – развитие робототехники в будущем
Robototexnika – texnologiya ilə bağlı bir sahəsi olaraq, robotoları, onların dizayn edilməsini, qurulmasını, idarə edilməsi metodlarını, informasiya emalı üçün yaradılan kompüter sistemlərini öyrənir. Dünyanın bir çox ölkələrində bu elm sahəsinin inkişafına böyük dəstək vardır. Bu sahənin inkişafı öz növbəsində, sənayenin avtomatlaşdırılmasının sürətli inkişafına təsir göstərir. Çünki bu texnologiyalar sənayedə insan faktorunun gücünü azaltmağa kömək edir.
Bu texnologiyaya maraq ən qədim zamanlardan mövcuddur. Çünki insanlar özləri yox, öz yerlərinə başqalarını işlətmək istəmişlər. Bu problem başlanğıcda qul əməyindən istifadə ilə həll olunsa da son bir neçə yüz ildə robotlar və digər avtomatlaşdırılmış sistemlər onların yerini almışdır. Bu sahəyə marağın ən qədim zamanlardan olmasına baxmayaraq, robototexnikanın araşdırılmasına və bir elm kimi öyrənilməsinə 20-ci əsrdən başlanmışdır.
Günümüzdə robototexnika elmi bir çox sənaye, məişət və sosial problemlərin həlli üçün istifadə edilir.
Robot avtonom və ya əvvəlcədən proqramlaşdırılmış tapşırıqları yerinə yetirə bilən elektromexaniki cihazdır. Mövcud tərifi ilə robotlar elektron və mexaniki bölmələrdən ibarət olan, hiss edə bilən və proqramlaşdırıla bilən cihazlardır. Başqa bir tərifdə robotlar canlıların funksiyalarını və davranışlarını təqlid edə bilən, fiziki qabiliyyətlərə və süni intellektə malik olan, fənlərarası elementləri ehtiva edən mühəndislik məhsullarıdır.
Robotlar birbaşa operatorun nəzarəti altında və ya müstəqil olaraq kompüter proqramının nəzarəti altında işləyə bilər. Robotlar deyildikdə ağıla insana bənzər maşınlar gəlsə də, insana bənzəyən robotlar çox azdır.
Bu gün robotların ən böyük istifadə sahəsi sənaye istehsalıdır. Xüsusilə avtomobil sənayesində çoxlu sayda robot istifadə edilir. Bunların əksəriyyəti qol şəkilli robotlardır. Bunlar hissələri yığan, qaynaq edən və rəngləyən robotlardır.
Evlərdə robotlardan istifadə getdikcə artır. Evlərə ilk girən robotlar Furby və AIBO kimi oyuncaqlardır. Xüsusilə ABŞ-da ev işlərində kömək edən robotlardan istifadə getdikcə daha çox yayılır. Özünü süpürən robot tozsoranlara böyük tələbat var.
Beynəlxalq Ağıllı Robotiklər və Tətbiqlər Jurnalı (IJIRA) robototexnika və onların geniş tətbiqlərində inkişafları inkişaf etdirən yeni kəşflərin və yeni texnologiyaların yayılmasına kömək edir.
Bu jurnal nəzəri əsaslardan və texnoloji irəliləyişlərdən tutmuş istehsal, kosmik nəqliyyat vasitələri, biotibbi sistemlər və avtomobillər, məlumat saxlama cihazları, səhiyyə sistemləri, məişət texnikası və ağıllı magistral yollar daxil olmaqla müxtəlif tətbiqlərə qədər bütün robototexnika mövzuları üçün nəşr və ünsiyyət platforması təqdim edir.
IJIRA tədqiqatçıların, peşəkarların və sənaye praktikantlarının töhfələrini alqışlayır. O, orijinal, yüksək keyfiyyətli və əvvəllər dərc olunmamış tədqiqat işlərini, qısa hesabatları və tənqidi rəyləri dərc edir.
Xüsusi maraq sahələri bunlarla məhdudlaşmır: qabaqcıl aktuatorlar, sensorlar və digər aparat tətbiqləri; dizayn, modelləşdirmə, prototipləşdirmə və digər istehsal mövzuları; süni intellekt və maşın öyrənməsi; planlaşdırma, naviqasiya və lokalizasiya; rabitə və nəzarət; insan və robot qarşılıqlı əlaqəsi; kollektiv və sosial robotlar; mobil robotlar və ağıllı avtonom sistemlər; eləcə də müxtəlif yeni və ortaya çıxan tətbiqləri araşdırır. Avtomatlaşdırma, mexatronika, robot dizaynı və istehsal daxil olmaqla robototexnikanın bütün aspektlərini əhatə edir.
Robot texnologiya sənayesi böyük sürətlə inkişaf edir. İnsanlar indi robototexnikanın təklif edə biləcəyi imkanlara heyran olurlar və buna görə də bir çox həvəskarlar maraqlı və çiçəklənən karyera qurmaq üçün bu yolu seçirlər.
Robototexnika sahəsi qabaqcıl robototexnika texnologiyasının dizaynı, inkişafı və tətbiqinin arxasında duran elmi öyrənən bir çox müxtəlif mühəndislik sahələrinin birləşməsidir. İndi daha geniş miqyasda populyarlıq qazanır və heç kimə sirr deyil ki, robot texnologiya sənayesi böyük sürətlə inkişaf edir. İnsanlar indi robototexnikanın təklif edə biləcəyi imkanlara heyran olurlar və buna görə də bir çox həvəskarlar maraqlı və çiçəklənən karyera qurmaq üçün bu yolu seçirlər. Burada robototexnika sahəsi ilə maraqlanırsınızsa, oxumalı olduğunuz ilk beş kitabı araşdıraq
1. Rise of the Robots, müəllif – Martin FORD
Şəkil 2. Rise of the Robots
Bu kitab Süni intellektin artıq iş və biznes tərzimizi necə dəyişdirdiyini əhatə edir. Kitab oxuculara sürətlənən texnologiyanın iqtisadi perspektivlərimizə necə təsir etdiyini və daha çox şeyləri anlamağa kömək edir.
Kitabda robotun kinematikası və dinamikasını öyrəndikcə düzgün idarə edə bilən inteqrasiya olunmuş sistemin necə yaradılacağı təsvir edilir. Praktiki təkmilləşdirmələr, eləcə də robot davranışı üzərində düzgün nəzarətə nail olmaq üçün prosedurlar təklif olunur.
2. Machine Vision and Navigation, müəlliflər – Sergiyenko, Wendy Flores-Fuentes, Paolo Mercorelli
Şəkil 4. Machine Vision and Navigation
Bu kitab görmə əsaslı tətbiqlərə dair müxtəlif perspektivləri vurğulayır. Bu töhfələr optoelektron sensorlar, 3D və 2D maşın görmə texnologiyaları, robot naviqasiyası, idarəetmə sxemləri, ağıllı alqoritmlər və görmə sistemlərinə yönəldilmişdir. Müəlliflər pilotsuz uçuş aparatlarının, avtonom və mobil robotların, sənaye yoxlama tətbiqlərinin və struktur sağlamlığının monitorinqinin müxtəlif istifadə hallarına diqqət yetirirlər.
3. Making Simple Robots, müəllif – Kathy Ceceri
Kitab texniki biliyi olmayan insanların belə başa düşə biləcəyi dildə yazılmışdır. Bu, əsasən daha inkişaf etmiş səviyyələrə keçmək istəyən yeni başlayanlar üçün bir kitabdır. O, yenilikçilərin istifadə etdiyi qabaqcıl məhsul və alətlərə əsas sənətkarlıq bacarıqlarını əhatə edir.
4.Robotics, müəllif – Peter Mckinnon
Robototexnika haqqında bilməli olduğunuz hər şey Peter Mckinnon tərəfindən şərh edilmişdir. Bu kitabı oxuduğunuz zaman siz robotu inkişaf etdirmək üçün hansı materiallardan istifadə edəcəyinizi və yeni dostunuza ətrafdakı dünyanı təhlil etmək üçün hansı sensorlara ehtiyacınız olacağını öyrənəcəksiniz. Bu kitab həmçinin öz avtonom divara dırmaşan robotunuzu necə inkişaf etdirə biləcəyinizi izah edir.
Robototexnika nədir ? Robotexnika termini “robot” sözündən götürülüb robotların konsepsiyasını, dizaynını, istehsalını və istismarını əhatə edən mühəndisliyin bir sahəsidir. Robot texnikası sahəsinin məqsədi insanlara müxtəlif yollarla kömək edə bilən ağıllı maşınlar yaratmaqdır. Etimologiyası. Robot sözü ilk dəfə 1920-ci ildə Çex yazıçısı Karel Čapek (azərb. Karl Kapek) tərəfindən yazılan və səhnələşdirilən R.U.R. (Rossum’s Universal Robots – azərb. Rossumun Universal Robotları) əsərində istifadə olunmuşdur. Bu sözün kökü slovak dilindəki “robota” sözündən gəlir və mənası qul, kölə deməkdir. Tarixi. Robotlar ilk dəfə televiziya ekranlarına 1927-ci ildə çıxıb. Fritz Langın prodürerliyi ilə çəkilmiş bu filmdə alman aktrisası Brigitte Helmin canlandırdığı “maşın insan” (alman. Maschinenmensch) obrazı tarixdə ilk robot obraz hesab olunur. İlk tam avtonom robot XX əsrin ikinci yarısında hazırlanıb. İlk rəqəmsal və proqramlanabilən robot da elə bu dönəmdə 1961-ci ildə düzəldilib və sənayedə tətbiq edilib. Unimate adlanan bu robotun işi qəliblərə tökülüb bərkidilmiş metal hissələrinin çıxarılıb yığılmasında istifadə olunub. Günümüzdə bunun kimi bir çox sənaye robotları müxtəlif zavod və fabriklərdə geniş istifadə edilir. Onlar istehsalatda, yükdaşımada və digər sahələrdə istifadə olunur. Lakin elmi fantastika müəllifi İsaak Asimov bu sözdən istifadə etdi. Oxford English Dictionary tərəfindən 1940-cı illərdə bu termindən istifadə edən ilk şəxs olmuşdur. Asimovun Üç Robot Qanunu bu günə qədər gəlib çatmışdır:
Robotlar heç vaxt insanlara zərər verməməlidir;
Robotlar 1-ci qaydanı pozmadan insanların göstərişlərinə əməl etməlidir;
Robotlar özlərini qorumalıdırlar digər qaydaların pozulması halında. Robotların əsas növləri hansılardır? Ən çox yayılmış altı robot növü vardır:
avtonom mobil robotlar (AMR) – autonomous mobile robots (AMRs);
avtomatlaşdırılmış idarə olunan nəqliyyat vasitələri (AGV) – automated guided vehicles (AGVs);
robot qolları – robotic arms;
kobotlar – cobots;
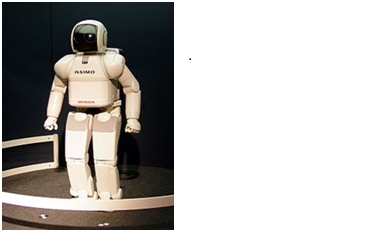
insanabənzər robotlar – humanoid robots;
hibridlərdir – hybrids.
Robotların modelləşdirilməsi və dizaynı:
Cyborgology (Kiberqologiya). Robot texnikası günümüzdə daha da inkişaf edərək yarı insan yarı robot olaraq adlandırdığımız texnologiya – Cyborg olaraq da yeni istiqamət yaranmışdır. Bu sahəni öyrənən elm Cyborgology (Kiberqologiya) adlanır. İnsan maşın və ya insan kompüter qarşılıqlı əlaqəsidir.
“Cyborg” bionika, biorobotika və ya androidlərlə eyni şey deyil; bu, hansısa süni komponentin və ya bir növ əks əlaqəyə əsaslanan texnologiyanın inteqrasiyası nəticəsində funksiyasını bərpa etmiş və ya inkişaf etmiş qabiliyyətlərə malik orqanizmə aiddir. Kiborqlar adətən məməlilər, o cümlədən insanlar hesab edilsə də, onlar hər hansı bir orqanizm ola bilər.
Tibbdə kiborqların iki mühüm və fərqli növü var: bərpaedici və gücləndirilmiş. Bərpaedici texnologiyalar “itirilmiş funksiyanı, orqanları və əzələlərı bərpa edir.” Bərpaedici kiborqizasiyanın əsas aspekti funksiyanın sağlam və ya orta səviyyəyə qayıtması üçün pozulmuş və ya çatışmayan proseslərin təmiridir. İtirilmiş orijinal qabiliyyət və proseslərdə heç bir təkmilləşdirmə yoxdur.
Ümumilikdə protezlər itirilmiş və ya zədələnmiş bədən hissələrini mexaniki bir sənətkarlığın inteqrasiyası ilə tamamlasa da, tibbdəki bionik implantlar model orqanların və ya bədən hissələrinin orijinal funksiyanı daha yaxından təqlid etməsinə imkan verir.
Termin bəzi təriflərinə görə, insanların ən sadə texnologiyalarla belə fiziki bağlılıqları onları artıq kiborqlara çevirmişdir. Tipik bir misalda, süni kardiostimulyator və ya implantasiya edilə bilən kardioverter-defibrilatoru olan bir insan kiborq hesab olunacaq, çünki bu cihazlar bədəndəki gərginlik potensialını ölçür, siqnal emal edir və elektrik stimullarını çatdıra bilir. o insan diridir. Mexanik modifikasiyanı istənilən əks əlaqə cavabı ilə birləşdirən implantlar, xüsusən də koxlear implantlar həm də kiborq təkmilləşdirmələridir. Bəzi nəzəriyyəçilər kontakt linzalar, eşitmə cihazları, smartfonlar və ya gözdaxili linzalar kimi modifikasiyaları insanların bioloji imkanlarını artırmaq üçün texnologiya ilə uyğunlaşdırmasına misal gətirirlər.
Bəzi nəzəriyyəçilərin fikrinə görə isə fiziki cəhətdən əngəllilərə məsələn protez ayaqların, əllərin və s. implantasiya olunması kiborqa daxil deyil. Mexatronik mühəndisləri tərəfindən reabilitasiya məqsədilə hazırlanan protezlər bir növ xarici üzv vəzifəsi daşıyır.
Texnopark nədir? Universitet, sənaye, araşdırma mərkəzləri, sahibkarlar və bazarlar arasındakı əməkdaşlığı artırmaq, bilik və texnologiya transferini asanlaşdırmaq məqsədilə yüksək əlavə dəyərli tədqiqat və inkişafa söykənən qabaqcıl texnologiyalı məhsul və xidmətlərin istehsalına uyğun infrastruktur, üstqurum və xidmətlər ilə təsir edən təşkilatlardır. Texnoparklarda texnoloji ixtiralar tədqiqat üçün katalitik inkubator mühiti yaradır və sonra istehsala hazırlana bilər. Texnoparklar akademik tədqiqatların akademik mühitdə kommersiyalaşdırılmasına imkanlar yaradır. Onlarsız bir çox akademik şirkətlərin yaradılması qeyri-mümkün olardı.
Regionun xüsusiyyətlərinə görə texnoparkların növləri:
1. Universitet texnoparkları;
2. Regional sahə texnoparkları;
3. Sənaye texnoparkları;
4. Texnoloji inkubatorlar və ya innovasiya biznesi;
5. Şəbəkə texnoparkları;
6. Kovorkinq.
Texnopark modellərini beş qrupa bölmək olar:
1. Dövlət əsaslı – texnoparkın quruluşunu birbaşa dövlət öz üzərinə götürür.
2. Universitet əsaslı – Universitetlərin öz başlarına ya da dövlətdən dəstək alaraq qurduqları, idarə edərək faydalandıqları texnoparklardır.
3. Özəl sektor əsasında – Universitetlər və maliyyə strukturu güclü firmalar tərəfindən əməkdaşlıq ilə qurulan texnoparklardır.
4. Yerli rəhbərliyə dayalı – Bəzi böyük şəhərlərdə bölgənin iqtisadi inkişafına töhfə vermək məqsədiylə yerli rəhbərliklər tərəfindən qurulub dəstəklənən parkları.
5. Qarışıq model – Dövlət və özəl sektorun birlikdə qurduğu texnoparklardır.
Texnoparkların inşaat modelləri
Texnoparkın yaradılması məqsədləri:
– iqtisadiyyatın davamlı inkişafı və rəqabət qabiliyyətinin artırılması;
– müasir elmi və texnoloji nailiyyətlərə əsaslanan innovasiya və yüksək texnologiyalar sahələrinin genişləndirilməsi;
– elmi tədqiqatların aparılması və yeni texnologiyaların işlənilməsi üzrə müasir komplekslərin yaradılması.
Texnoparkın maliyyələşməsi:
Maliyyələşmə texnopark fəaliyyətinin əsas elementlərindəndir. Vəsait cəlb edilməsi üçün aşağıdakı ehtiyatlar cəlb edilməlidir:
– Qrantlar;
– Kommersiya fəaliyyəti;
– Konfrans, sərgi, seminar keçirilməsi;
– Texnologiyaların satışı;
– Marketinq tədqiqatlarının satışı və s.;
– Dövlət maliyyələşməsi;
– İnvestisiyanın cəlb edilməsi.
Texnoparkın yaradılması:
– Texnoparkın yaradılması haqqında qərarı mərkəzi icra hakimiyyəti orqanının və ya dövlət müəssisəsinin (texnoparkın dövlət elm və təhsil müəssisələri yanında yaradılması barədə isə ─ Azərbaycan Respublikası Nazirlər Kabinetinin) təklifləri əsasında Azərbaycan Respublikasının Prezidenti qəbul edir.
– Texnopark dövlət elm və təhsil müəssisələri yanında və ya müstəqil yaradılır.
– Texnoparkın yaradılması haqqında qərarda onun yaradılmasının məqsədi, fəaliyyət profili, maliyyələşmə mənbələri, ərazisi, idarə olunması və fəaliyyətinin təşkili ilə bağlı məsələlər müəyyən edilir.
– Texnoparkın yaradılması haqqında təklifə aşağıdakı sənədlər əlavə edilir:
– texnoparkın yaradılmasının iqtisadi əsaslandırılması;
– texnoparkın təklif edilən fəaliyyət profili haqqında məlumat;
– texnoparkın fəaliyyət ərazisi (ərazi sərhədlərinin dəqiq təsviri və ərazinin planı, yaradılması təklif olunan texnoparkda yerləşən torpaqların tərkibi haqqında məlumat, torpaq sahələrinin mülkiyyətçilərinin və torpaq istifadəçilərinin siyahısı göstərilməklə), sosial və digər infrastrukturla təminatı imkanları haqqında məlumat;
– yaradılması təklif edilən texnoparkın əsasnaməsinin layihəsi;
– texnoparkın yaradılması ilə əlaqədar tədbirlər planı;
– Texnoparkın yaradılması üçün ayrılan torpaq sahəsi:
– məqsədli təyinatına və hüquqi rejiminə görə sənaye, nəqliyyat, rabitə və digər təyinatlı torpaqlara aid olmalıdır;
– mühəndis-kommunikasiya təminatı sistemlərinə çıxış imkanlarına malik olmalıdır;
– əşyaların və (və ya) hüquqların yüklülüyündən azad olmalıdır;
– “Ətraf mühitin mühafizəsi haqqında” Azərbaycan Respublikası Qanununun tələblərinə cavab verməlidir.
Robototexnika müasir dövrümüzdə ən inkişafda olan sahələrdən biridir. Hələdə günbəgün təkmilləşərək daha da inkişaf edir. Fəaliyyət sahələrinin bir çoxuna sirayət etmişdir. Həm əmək məhsuldarlığının artırılması, həm də əmək şəraitinin səmərəliyinin təşkili olaraq bir çox müəssisələrdə texnoloji cəhətdən dəstək verməkdədir. Tibb sahəsi, İnformasiya texnologiyaları, sənaye, qurum və quruluşlar,mühasibatlıq, avtomatlaşdırma və s sahələrə doğru yönələrək müxtəlif spektrda təkmilləşdirməni təşkil edir. Artıq dövrümüzdə daha da iləri gedilərək birəbir insanların bir növ robot versiyası modelləşdirilmişdir. Əlbəttə robotlar hər nə qədər vizual olaraq, insana bənzəsə də onlarin insani keyfiyyətləri bu sahədə arxa planda qalan əsas məqamlardan biridir
Burada robotlaşdırma sənayesi öz bərabərində hər nə qədər müsbət yol alsada, bununla belə mənfi özəllikləri də öz bərabərində gətirir.Birinci növbədə gələcəkdə ən qlobal gözləntilərdən birinə çevrilən insan əməyinə ehtiyac duyulmamasıdır . Bu da işsizlik kimi qlobal problemlerə çevriləcək. Müsbət özəllikləri isə zamana qənaət,yəni tez bir zamanda yüksək məhsuldarlıq, dəqiqlik, xətaların mimimum olması və s. Əvvəlki illərə nisbətən 2021 -ci ildən çox yüksək inkisaf dinamikasi izlənilməkdədir.
Texnopark daha geniş fəaliyyət spektrinə malik olsada, bəzi ölkələrdə sırf robotik sahədə ixtislaşması sahənin inkişafına əvəzsiz təkan vermişdir. Burada yeniyetmələrə və gənclərə layihələrin təşviqi və qanuniləşdirilməsində bilik və bacarıqlar əldə etməyə kömək edəcək proqramların olması düşünürəm ölkənin bu sahədə olan profilini daha da artıracaqdır. Təhlillər göstərir ki, texnoparkların yaradılması Azərbaycanda İKT sektorunun yüksək inkişafına səbəb ola bilər. Azərbaycanda texnoparkların səmərəli fəaliyyətlərinin təmin edilməsi üçün, bu sahədə ciddi uğurlar əldə etmiş dünya dövlətlərinin müsbət təcrübəsi nəzərə alınmalıdır. Texnoparkların müasir modelinin yaradılmasında ABŞ, Çin, Cənubi Koreya, Hindistan, Avstraliya, Birləşmiş Ərəb Əmirliklərinin tərübəsindən istifadə edilə bilər.
Hazırda Azərbaycanda texnoparkların yaradılması istiqamətində böyük işlər görülür. İKT sahəsində yaradılan texnoparklar istər Universitetlər nəzdində, istərsə də qurum və quruluşların nəzdində olan texnoparklar, onların fəaliyyəti ölkə üçün xüsusi əhəmiyyət kəsb edir
Mobil manipulyator – mobil platformada quraşdırılmış manipulyator-robotdan tikilmiş robotlaşdırılmış sistemdir. Belə sistemlər özündə mobil platformaların və robotlaşdırılmış manipulyatorların üstünlüklərini birləşdirir və onların çatışmazlıqlarını azaldır. Məsələn, mobil platforma ARM əməliyyat yerini genişləndirir, ARM bir neçə əməliyyat funksiyasını təklif edir.
Mobil manipulyasiya sistemi ikiqat üstünlüyə malikdir: mobil platforma ilə təmin edilən mobillik və manipulyator tərəfindən təmin edilən çeviklik. Mobil platforma manipulatora geniş iş sahəsi təqdim edir. Mobil platforma azadlığının əlavə dərəcəsi də istifadəçiyə daha çox seçim imkanı verir. Lakin belə bir sistemin istismarı bir çox azadlıq dərəcələri və fəaliyyət göstərdiyi struktursuz mühit səbəbindən çətin bir vəzifədir.
Sistemin ümumi tərkibi:
Mobil platforma;
Robot manipulyator;
Görmə;
Alətlər dəsti.
Hal-hazırda, mobil manipulyasiyalar inkişaf və tədqiqat mühitində xüsusi diqqət tələb edir, mobil manipulyatorlar isə həm avtonom, həm də teleidarəetmənin köməyi ilə idarə olunan bir çox sahələrdə, məsələn, kosmosun mənimsənilməsində, hərbi əməliyyatlarda, evdə və səhiyyədə qulluqda istifadə olunur. Bununla belə, sənaye sahəsində, mobil manipulyatorların tətbiqi məhdud idi, baxmayaraq ki, intellektual və çevik avtomatlaşdırma ehtiyacları mövcuddur. Bundan əlavə, zəruri texnoloji obyektlər (mobil platformalar, robot-manipulyatorlar, proqram təminatı və alətlər) olduqca çox hazır komponentlərdir.
Bunun səbəbi ondan ibarətdir ki, işlənmə sahələri ənənəvi olaraq fəaliyyət göstərir və buna görə də yeni texnologiyaların tətbiqi ilə risk almaq istəmirlər. Bundan əlavə, sənaye mobil manipulyasiya sahəsində, fərdi texnologiyaların, xüsusilə də robotlaşdırılmış manipulyatorların və alətlərin optimallaşdırılmasına diqqət yetirilir, inteqrasiya, istifadə və tətbiq nəzərə alınmır. Bu o deməkdir ki, istehsal mühitlərində mobil robotların az sayda tətbiqi barədə məlumat verilib.
Şəkil 1. Mobil manipulyator MM-400
MM-400 mobil manipulyator özündə həm sənaye, həm də tədqiqatlar üçün çox kompakt, çevik robotlaşdırılmış sistemə etibarlı diferensial robotlaşdırılmış MP-400 platformasını və yüngül manipulyatoru birləşdirir. Mm-400 kompakt dizaynı sayəsində, digər platformaların artıq manevr edə bilmədiyi çox məhdud ərazilərdə istifadə üçün idealdır.
Şəkil 2. Mobil manipulyator MMO-500
MMO-500 mobil manipulyator universal robotlar, Pilz və ya Schunk-dan asan manipulyator ilə MPO-500 Omnidirectional robotunun birləşməsidir. Mecanum MMO-500 təkərlərinin sayəsində hər hansı bir istiqamətdə asanlıqla hərəkət edə bilər və quraşdırılmış robot qolunu asanlıqla hərəkət edə bilər. Kompleks manevr və kinematik məhdudiyyətlər olmadan, leverage əməliyyat zonası əhəmiyyətli dərəcədə artırıla bilər. MMO-500 ən məşhur istehsalçıların robot manipulyatorlarını daşıya bilər. MMO-500-in böyük sahəsi və yükgötürmə qabiliyyəti sayəsində hətta 10 kq-a qədər yüklənməyə tab gətirə biləcək güclü universal Ur10 Robotlarını yerləşdirə bilər. Platforma və arm açıq mənbə ROS istifadə edərək idarə oluna bilər. MMO-500 tam sənədləri və ətraflı ROS modelləşdirilməsi onlayn sənədləşdirmə sistemimizdə tapıla bilər.
Mm-700 mobil manipulyator Universal robotlardan, məsələn, MP-700 mobil robotuna yüngül əl birləşdirir. MP700 baza platformasının çox yüksək faydalı yükü və sabitliyi də, Baxter kimi digər silah növlərini KUKA – dan Rethink Robotics və ya LBRİİWA kimi asanlıqla inteqrasiya etməyə imkan verir. MPO-700 bütün Neobotix robotlarının ən böyük batareya gücünə malik olduğundan, hətta robotlaşdırılmış əl ilə bütün gün ərzində offline və fasiləsiz işləyə bilər. Platforma və qolu ROS ilə idarə oluna bilər. MM-700-in tam sənədləri və ətraflı ROS modelləşdirilməsi onlayn sənədləşdirmə sistemimizdə tapıla bilər.
Mobil manipulyator-mobil platformada quraşdırılmış manipulyator-robotdan tikilmiş robotlaşdırılmış sistemdir. Belə sistemlər özündə mobil platformaların və robotlaşdırılmış manipulyatorların üstünlüklərini birləşdirir və onların çatışmazlıqlarını azaldır.
Mobil manipulyasiya sistemi ikiqat üstünlüyə malikdir: mobil platforma ilə təmin edilən mobillik və manipulyator tərəfindən təmin edilən çeviklik. Mobil platforma manipulatora geniş iş sahəsi təqdim edir. Mobil platforma azadlığının əlavə dərəcəsi də istifadəçiyə daha çox seçim imkanı verir. Lakin belə bir sistemin istismarı bir çox azadlıq dərəcələri və fəaliyyət göstərdiyi struktursuz mühit səbəbindən çətin bir vəzifədir.
Qısa bir sözlə əvəz etmək lazım olarsa mobil manipulatorlar insanlara bir çox sahədə kömək edir və onların işləmə təhlükəsini azaldır.
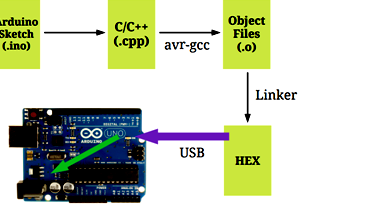
Arduino, interaktiv layihələr inkişaf etdirmək üçün hazırlanmış elektron bir hardware və proqram əsaslı inkişaf platformasıdır. Arduino lövhələrində Atmel AVR mikrokontroleri və dövrə əlaqələri üçün müxtəlif elektron komponentlər var. Arduino, İtalyan mühəndisləri tərəfindən hazırlanmışdır və tamamilə açıq mənbəli bir platformadır. Beləliklə, istəsəniz dizaynla hazır Arduino lövhələrini ala bilərsiniz və ya öz komponentlərinizlə öz Arduino dövrənizi hazırlaya və proqramlaşdıra bilərsiniz.
Arduino PCB (AtmegaXX) üzərindəki mikroprosessor Arduino proqramlaşdırma dilində proqramlaşdırılmış və bu proqram işlənməyə əsaslanan Arduino PT İnkişaf Mühiti (IDE) istifadə edərək karta quraşdırılmışdır. Hər kartda ən azı bir inteqrasiya edilmiş 5V tənzimləyici inteqrasiyası və 16MHs və ya daha yeni 32MHz tezliyinə malik kristal osilloqraf var [1].
Arduino demək olarki, bütün elektronik cihazlara qoşula bilər və eləcə də istənilən qaydada elektronik cihazları idarəetmə qabilliyyətinə malikdir. Arduinonun saysız bir çox modelləri mövcuddur və dünyanın istənilən bölgəsində insanlar bu komplektdən istifadə etməklə azad bir şəkildə istədikləri yeni texnologiyaları yarada bilirlər (şəkil 1).
Şəkil 1. Arduinonun xarici görünüşü
Arduino Uno və Arduino Pro mini modulları haqqında ümumi məlumat.Əvvəldə də qeyd etdiyimiz kimi, bir çox arduino növü mövcuddur. Bunlardan biri Arduino Uno adlandırılır. Bu, ATmega328 əsaslı Arduino kartından ibarətdir. Arduino Uno bir sıfırlama düyməsinə və pin giriş və çıxışlarına malikdir (şəkil 2) [1].
Şəkil 2. Mikrokontrollerin proqramlaşdırılma diaqramının təsviri
Arduino Uno-nun 3.3V, 8MHz və 5V, 16MHs olaraq iki bir-birindən fərqli versiyası var. Arduino Uno-dakı gərginlik tənzimləyicisi 12V-ə qədər giriş gərginliyini qəbul edir. Xarici təchizatı gərginliyi Arduinonun RAW pinindəndaxil edilir [1].
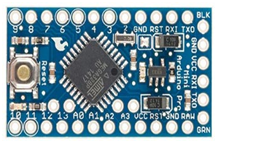
Arduino Uno, ATmega328 əsaslı Arduino lövhəsidir. Arduino Pro Mini haqqında yenidən qurma düyməsinə və hər hansı bir konfiqurasiyaya uyğun hər hansı bir pimi və ya məftili lehimləyə biləcəyiniz pin deliklərinə malikdir. Arduino Pro Mini’nin 3.3V, 8MHz və 5V, 16MHz iki fərqli versiyası var (şəkil 3).
Şəkil 3. Arduino Pro mini (ön və araxa tərəf)
Arduino Pro Mini kiçik ölçüsü sayəsində müxtəlif tətbiqlərdə istifadə oluna bilən və breadboard ilə hazırlanacaq bütün tətbiqetmələrə uyğun bir Arduino modelidir.
Arduino Pro Mini-də gərginlik tənzimləyicisi 12 V-ə qədər giriş gərginliyi qəbul edir. Kənardan verilən qida gərginliyi arduinonun RAW pinindən verilir. Arduino Pro Mini istifadə edərkən USB-dən güc almaq və ya əlaqə qurmaq üçün bir FTDI kartına bağlı olmalıdır (şəkil 4).
Şəkil 4. FTDİ FT232FL USB-UART çeviricisi
FTDI USB-RS232 çeviricisi, FTDI FT232RL USB-dən ardıcıl IC üçün əsas çevirici kartıdır. Bu kartın pin çıxışları FTDI kabellərlə uyğunlaşıb rəsmi Arduino və kopyalanmış 5V Arduino kartları ilə işləyə bilir.
Bu kart FTDI naqili üzərində istifadəni asanlaşdırmaq üçün TX və RX LED-ləri ehtiva etməkdədir. Kartın işlədiyinə əmin ola bilmək üçün ardıcıl LED-lərin yanıb sönməsi ilə anlaya bilirik [1].
Bu kart Arduino inkişaf xərclərini azaltmaq və istifadə rahatlığını artırmaq üçün nəzərdə tutulmuşdur (yaxşı düşünülmüş funksiyasından biri avtomatik sıfırlama funksiyasıdır). Arduino Pro, Arduino Pro mini və LilyPad kartları bu cür konnektorlardan istifadə edir.
Xüsusiyyətləri bunlardan ibarətdir: Mac, Linux, Android, WinCE, Windows 7/8/8.1/10 dəstəklər; 3 güç mod: 5V çıxış, 3.3V çıxışı ya da hədəf kart üzərindən (3.3V-5V); 3 LED: TXD LED, RXD LED, POWER LED; Digər pin bağlantıları; Arduino Uno-nun texniki xarakteristikaları; Mikrokontroller: ATmega328; İşçi gərginliyi: 3.3 V və ya 5 V DC (modeldən aslı olaraq); Məsləhət görülən işçi gərginliyi: maksimum 12 V DC; Rəqəmsal giriş/çıxış pinləri: 14 ədəd (6 dənəsi PWM çıxışını dəstəkləyir); Analog giriş pinləri: 6 ədəd; Giriş/çıxış pini başına düşən DC cərəyan : 40 mA; Flash yaddaşı : 32 KB (0.5 KB bootloader üçün istifadə edilir); SRAM : 2 KB; EEPROM :1 KB; Saat tezliyi : 3.3 V modeli üçün 8 MHs, 5 V modeli üçün 16MHs [1].
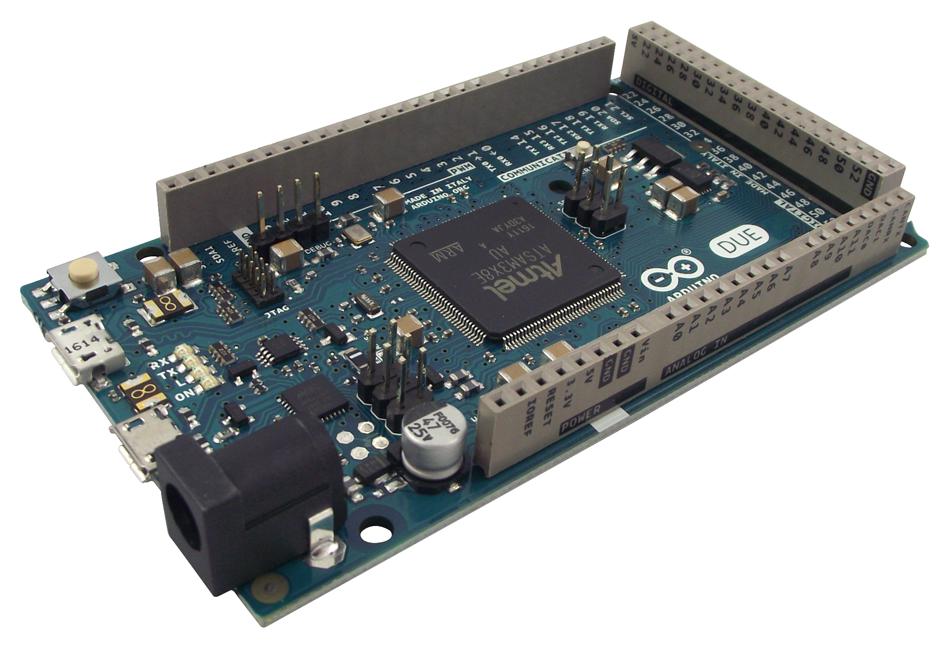
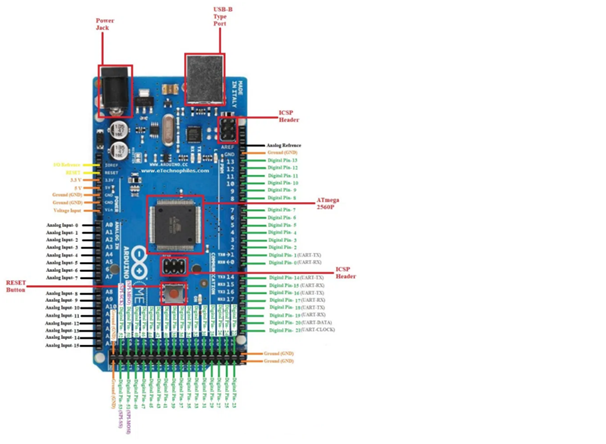
Arduino Mega proqramatoru Arduino Uno nəslindən olan proqramatorlardan çoxsaylı funksiyaların əlavə olunması ilə tanınır və ATMEGA2560 çipi üzərində hazırlanıb. Bu proqramator profesional və yarım profesional avadanlıqların qurulmasında tədbiqini tapmışdır. Arduino Meqa-nın proqramlaşdırma girişi USB interfeysi vasitəsilə həyata keçirilir. Arduino MEGA-nın texniki xarakteristikaları aşağıdakılardır [2]:
Nüvə: 8-bitlik AVR;
Takt tezliyi: 16 MHs;
Flaş-yaddaşın həcmi: 256 КB;
АRÇ girişlərin sayı: 16;
EİM girişlərin sayı: 15;
Qida gərginliyi: 5 V;
Giriş gərginliyi: 7–12 V.
Şəkil 5. Arduino Mega-nın ümumi görünüşü
Kontrollerin elektrik qidalanması iki üsulla yerinə yetirilməsi mümkündür:
Kompüterə qoşulduqda USB vasitəsilə;
Kənar elektrik qida bloku vasitəsilə.
Qida mənbələrinin hər ikisini qoşduqda proqramator böyük qidalandırma rejiminə keçir. ARDUİNO proqramlaşdırıcının giriş və çıxış kontaktlarında cərəyan məhdudiyyəti hər zaman mövcuddur. Bütün analoq və rəqəmsal kontaktları 5 V-dək işləyirlər və xüsusi sxemlər vasitəsi ilə ifrat cərəyandan qorunurlar. Bəzi kontaktların cərəyandan qorunması üçün rezistorlar ilə sxemə qoşulurlar. Bu kontrollerdə çıxışlarda axan maksimal cərəyan 45 mA-dən artıq olmamalıdır.
Burada dörd işıq diodu mövcuddur ki, giriş və çıxış siqnallarının mövcudluğunu əks etdirir. Onlar ötürmə (TX), qəbul (RX), qida (PWR) və əlaqə (L) kimi göstərilmişdir. Siqnalın aşağı səviyyəsi zamanı ötürmə və qəbul diodları işıqlanır. PWR işıq diodu 5 V-da gərginlik vaxtı yanır və göstərir ki, qidalanmaya qoşulmuşdur. Son işıq diodu ümumi təyinatlıdır, siqnalın yüksək səviyyəsi zamanı aktiv olur.
Hal-hazırda, Arduino Mega-nın müxtəlif növləri mövcuddur. R1, R2, R3 və s. versiyaları var və quraşdırılan kontrollerlər ilə fərqlənirlər. Arduino Mega-nın çıxışları şəkil 4.2-də göstərilmişdir [3].
Ardıcıl interfeys: 0 (RX) və 1 (TX); Serial 1: 19 (RX) və 18 (TX); Serial 2: 17 (RX) və 16 (TX); Serial 3: 15 (RX) və 14 (TX). Göstərilən ayaqlar məlumatların ötürülməsi və qəbulu üçün istifadə edilir. 0 və 1 çıxışları, USB-UART rolunu yerinə yetirərək, kontrollerin müvafiq çıxışlarına qoşulub.
Kəsilmələr: 2 (0 kəsilmə), 3 (1 kəsilmə), 18 (5 kəsilmə), 19 (4 kəsilmə), 20 (3 kəsilmə) və 21 (2 kəsilmə). Bu çıxışlar kəsilmə siqnalları mənbəyi kimi müxtəlif şəraitdə istifadə edilə bilərlər.
EİM: 2-13 və 44-46 çıxışları. Köməkçi funksiya ilə analogWrite() funksiyasından istifadə edərək 8 bitlik analoq siqnalını EİM siqnal şəklində çıxarmasına imkan verir.
İşıq diodu: 13 çıxışı. Yüksək məlumat gəldikdə işıqlanır, əks halda sönür.
Şəkil 4.2. Arduino Mega proqramotorun çıxışları
Arduino Mega ümumilikdə, 66 ədəd giriş-çıxış ayaqlarından ibarətdir. Analoq giriş-çıxışı “A” hərfi ilə rəqəmli giriş-çıxış “D” hərfi ilə işarələnir.
İstənilən elektron komponentləri (Led-lər, mühərriklər, sensorlar və s.) I/O portlarına qoşulması ilə idarəsi mümkündür. Bunlar öz funksiyalarına görə analoq və ya rəqəmsal-analoq interfeyslərdir. Adından da göründüyü kimi rəqəmsal girişlərdən istifadə etdikdə, onlarda siqnal yalnız iki səviyyədə ola bilər: məntiqi sıfır (0, LOW) və məntiqi bir (1, HIGH). Analoq girişlərin məqsədi analoq sensorların qoşulmasıdır.
Bu portların aktivləşdirilməsi üçün biz pinMode funksiyasından (<pin sayı>, <rejim: INPUT/OUTPUT>) istifadə edərək idarəetməsi mümkündür. Məlumatların oxunması üçün GİRİŞ, ötürülməsi üçün ÇIXIŞ tələb olunur. Arduino mikrokontrollerin portları üçün digər və son vacib meyar onların fiziki tərkibləridir. Hər pin 5V çıxış gərginliyinə malikdir və maksimum 0,02A çıxış cərəyanı təmin edə bilər.
Arduino proqramlaşdırılması üçün əvvəlcədən müəyyən edilmiş funksiyaları olan C++ dilinin sadələşdirilmiş versiyası istifadə olunur. Digər C proqramlaşdırma dilləri ilə olduğu kimi, kod yazma qaydaları da var. Ən əsası isə bunlardır:
Hər bir əmrdən sonra nöqtəli vergül (;) nişanını qoymaq lazımdır;
Bir funksiyanı elan etməzdən əvvəl funksiya bir dəyər qaytarmırsa, funksiya;
Tərəfindən qaytarılan məlumat növünü təyin etməlisiniz və ya ləğv etməlisiniz;
Bir dəyişəni elan etməzdən əvvəl məlumat növünü göstərməlisiniz;
Şərhlər görünür: // Sətri və /* blok */ ;
Arduino proqramlaşdırma səhifəsində məlumat növləri, funksiyaları, dəyişənləri, operatorları və dil strukturları haqqında daha çox məlumat əldə edə bilərsiniz. Bütün bu məlumatları yadda saxlamağa ehtiyac yoxdur. Həmişə kataloqa gedə və bir funksiyaya baxa bilərsiniz.
Arduino üçün bütün qurulmalar minimum 2 funksiyanı ehtiva etməlidir. Bu setup() və loop() funksiyalarıdır. Quraşdırma() funksiyası yalnız bir dəfə başlamazdan və dərhal cihazınızı işə salandan və ya yenidən başladıldıqdan sonra yerinə yetirilir. Ümumiyyətlə, bu funksiya pin rejimlərini bildirir, lazımi kommunikasiya protokollarını açır, əlavə modullarla əlaqə qurur və əlaqəli kitabxanaları konfiqurasiya edir
Loop() funksiyası setup() funksiyasından sonra yerinə yetirilir. İngilis dilindən tərcümədə Loop “döngü” mənasını verir. Bu, funksiyanın looped olduğunu göstərir, yəni təkrarlanan. Məsələn, çoxu Arduino kartlarına quraşdırılmış Atmega328 mikrokontrolleri ilə loop funksiyasını saniyədə təqribən 10,000 dəfə yerinə yetirir (gecikmələr və kompleks hesablamalar istifadə edilmirsə).
İstinadlar:
1. Проекты с использованием контроллера Arduino-Петин В.А./2-е изд., перераб. и доп.-СПб.:БХВ-Петербург, 2015.-464 с.:ил
Müəllif: AZTU-nun İnformasiya və telekommunikasiya texnologiyaları fakültəsinin Elektronika, telekommunikasiya və radiotexnika műhəndisliyi ixtisası üzrə magistr Elvira ARAZLI
Layihələr. Bu gün texnologiya sahəsində inkşaf edən “Robotexnika” onun ən aktual qollarından biridir. Robotların hər sahədə insanların əlindən tutmağa potensialları olduğu üçün onlara olan maraq günü gündən artır. Buna görə də, müxtəlif cür və müxtəlif inkşaf səviyyəsindəki robotlar mütəmadi olaraq işıq üzü görür. Robotlar layihələr üzərində qurulur. Bu layihələri “Başlanğıc”, ”Orta” və ”Qabaqcıl” olaraq üç kateqoriyaya bölə bilərik. Başlanğıc və orta səviyyəli layihələr əsasən universitet tələbələri tərəfindən qurulur. Bunlara “Xətti İzləyən Robot (Line Following Robot)” (şəkil 1) və ya Pilləkən Qalxan Robot (Stair Climber Robot) (şəkil 2) kimi layihələri misal göstərmək olar.
Şəkil 1. Xətti İzləyən Robot (Line Following Robot)
Qabaqcıl robotlara gəldikdə isə, bu anlayış hər an “Orta” səviyyə ilə əvəz oluna bilər. Bunun səbəbi isə durmadan inkşaf edən robotexnika sektorudur. Robotların strukturu mürəkkəbləşdikcə, bizim qabaqcıl robot alqımız da dəyişir.
Hal-hazırda, mövcud olan “Qabaqcıl Robot” konsepsiyasinda insanabənzər robotların xüsusi yeri var. Buna daha yenicə ictimaiyyətə təqdim olunmuş “Ameca”-nı və mərhum alimimiz Lütfi Zadənin nəzəriyyələri əsasında, yaponlar tərəfindən hazırlanmış “Alter” adlı robotu misal göstərmək olar. Bu robotlardan “Ameca” mimikaları ilə, “Alter” isə əl və qol hərəkətləri ilə insanı xatırladır.
Jurnallar. Robotexnika jurnalları və orijinal tədqiqat məqalələri avtomatlaşdırılmış mexaniki cihazların dizaynı və istehsalından tutmuş, sınaq və praktiki tətbiqə qədər bütün aspektlər üzrə icmal məqalələri dərc etməyi nəzərdə tutur. Bu sahəyə çox böyük töhvələr vermiş “Journal of Mechanisms and Robotics” (Mexanizmlər və Robotexnika Jurnalı) də adı çəkilməyə layiq jurnallardandır. Bu jurnal, Mexanika Mühəndisliyi (Q2) ilə əlaqəli texnologiya kateqoriyalarını əhatə edən bir jurnaldır. Amerika Mexanika Mühəndisləri Cəmiyyəti (ASME) tərəfindən nəşr edilmişdir və reytinqi 8558-dir. Bu jurnal, yeni dizayn konsepsiyalarını, nəzəriyyələri və metodologiyaları, o cümlədən, dəzgahlar, avtomobil simulyatorları, tibbi robotlar, mikrorobotlar, “seç və yerləşdir” (pick and place) robotları, kabel robotları, yenidən konfiqurasiya edilə bilən (modul robotları), çevik, mobil və insanabənzər robotları əhatə edir. Digər elmi jurnallardan biri də “IEEE Journal” dır (Institute of Electrical and Electronics Engineers (Elektrik və Elektronika Mühəndisləri İnstitutu Jurnalı)). Jurnalın əsas hədəfi bu sahədə ideya və irəliləyişləri bölüşmək üçün dünyanın ən yaxşı tədqiqatçılarını və ən mühüm şirkətlərini bir araya gətirməkdir. Robot texnikası və avtomatlaşdırma sahəsində bir çox mühüm irəliləyiş tarixən ilk dəfə İEEE-də təqdim edilmişdir.
Kitablar. Robotexnika sahəsi əsasən praktika əsaslı bir sahə kimi qəbul olunduğu üçün, bəzən kitablar gözlənildiyi dəyəri almaya bilər. Halbuki, robotexnika elminə töhvə vermiş kitablar var ki, hansı ki, onlarsız bu sahədə bu dərəcədə sürətli inkşafı bərqərar etmək mümkünsüz olardı. Bu dəyərli kitablardan biri də Bruno Siciliano və Oussama Khatib tərəfindən yazılmış “Springer Handbook of Robotics”-dir. Bu kitab təkcə ekspertlər üçün deyil, həm də bu inkişaf edən sahəyə yeni başlayan insanlar üçün, məsələn, kompüter alimləri, həkimlər, mühəndislər və s. üçün ideal bir resursdur.
Şəkil 3. Springer Handbook of Robotics
Bundan əlavə, Robotexnika haqqındakı təməl məlumatları evdə öyrənmək istəyənlərə “Modern Robotics Mechanics, Planning, and Control” (Müasir Robotexnika Mexanikası, Planlaşdırması və İdarəedilməsi) kitabı kömək edə bilər. Robot texnikasına bu giriş mexanika, robotların planlaşdırılması və idarə edilməsinin fərqli və vahid perspektivini təklif edir. Öz-özünə öyrənmə üçün idealdır, çünki bu, yalnız birinci səviyyəli fizikanı, adi diferensial tənlikləri, xətti cəbri və bir az hesablama fonunu nəzərdə tutur.
Dərs vəsaitləri. Bu gün robotexnika fənni məktəblərdə çox geniş tədris olunmasa da, universitetlərdə kifayət qədər aktualdır. Lakin, hər bir ölkədə alimlər və mütəxəssislər bu elmə fərqli cür yanaşdıqları üçün bütün təhsil müəssisələrinin qəbul etdiyi şablon bir və ya bir neçə dərs vəsaiti yoxdur. Lakin məhşurları var və bunlardan biri Harward universitetində də tədris olunan “New Laws of Robotics” (Robotexnikanın Yeni Qanunları) kitabıdır. Kitab Frank Pasquale tərəfindən yazılmışdır. Kitabın ümumi məzmunu isə Asimov’un 3 robot qanununa yeni qanunlar əlavə etmək və onların doğruluq dərəcəsini təhlil etməkdir. Dərs vəsaitləri siyahısına Timothy D.Barfoot tərəfindən yazılmış “State Estimation for Robotics” kitabını da əlavə etmək olar. Bu kitab robototexnika üçün dövlət qiymətləndirməsinə vaxtında, qısa və yaxşı əhatəli giriş təqdim edir. O, qiymətləndirməyə nəzəri və həndəsi vasitələrin balanslaşdırılmış təqdimatını verməklə mövcud dərslikləri tamamlayır və bu vasitələrin robototexnikada yaranan ümumi qiymətləndirmə problemlərini həll etmək üçün necə istifadə oluna biləcəyini müzakirə edir. Kitab, həm də, nəzəriyyə ilə motivasiya edici nümunələr arasında əla tarazlıq yaradır.
Əksər hallarda uzaqdan idarə olunan hər hansı ötürücü cihaz tərəfindən teleoperasiya olunan (sistemlə məsafədən idarə olunan) robotlara uzaqdan idarə olunan robotlar deyilir. Burada insan və robot arasında birbaşa qarşılıqlı əlaqə var.
Uzaqdan idarə olunan robotların tətbiq sahələri hansılardır?
Günəş sistemimizdəki kosmik araşdırmaların əksəriyyətində uzaqdan idarə olunan robotlar var.
Uzaqdan idarə olunan robotlar hərbi və döyüş əməliyyatlarına böyük dərəcədə inteqrasiya etmiş vəziyyətdədir.
Uzaqdan idarə olunan robotlar, istifadəçinin robotu təhlükəsiz məsafədən idarə edə bildiyi bomba aşkarlama və zərərsizləşdirmə fəaliyyətlərində səmərəli şəkildə istifadə olunur.
Uzaqdan idarəetmə cihazları əsasən dərin okean və kosmos kimi mühitlərdə istifadə olunur, çünki fiziki olaraq belə yerlərdə olmaq son dərəcə təhlükəlidir.
Uzaqdan cərrahiyyə (həmçinin telecərrahiyyə kimi tanınır) bir həkimin xəstəni fiziki olaraq eyni yerdə olmasa da, cərrahi əməliyyat edə bilməsidir.
İstehsal sənayesində robototexnika hissələrin istehsalı, tamamlanması, köçürülməsi və yığılması üçün istifadə olunur.
Məsafədən idarə olunan robotlarda hansı texnologiyalardan istifadə olunur?
İnfraqırmızı texnologiya: Robot texnikasında ən çox istifadə edilən idarəetmə mexanizmidir. Ötürücü kimi də tanınan infraqırmızı pult qəbulediciyə və ya robota siqnal göndərmək üçün infraqırmızı işıqdan istifadə edir. O, “səs artırma” və s. kimi əmrləri təmsil edən xüsusi ikili kodlara uyğundur. Qəbuledici işığın infraqırmızı impulslarını ikili kodlara deşifrə edir.
Radiotezlik texnologiya: Bu uzaqdan idarəetmə vasitələri ötürücü vasitəsilə kodları ötürmək üçün radio dalğalarından istifadə edir. Müasir peyk televiziya sistemləri bu tip pultlardan istifadə edir. Bu tip pultla robotlar 100 futdan çox məsafədən idarə oluna bilər.
Nitqin tanınması texnologiyası: Tətbiq etmək ən çətin texnologiyadır, lakin robotlarla qarşılıqlı əlaqəni artırmaq üçün çox vacib bir aktivdir. Məqsəd mikrofonda deyilən bir ifadəni təhlil etməkdir, daha sonra yazıya köçürülür və istifadə olunur. Nitqin tanınmasını inteqrasiya etmək üçün müxtəlif API-lər mövcuddur. Bu texnologiyadan istifadə edən məşhur modullar arasında “Say It Module” var.
Səs texnologiyası: Nitqin tanınması texnologiyasına bənzər görünsə də, əslində tamamilə fərqlidir. Bu, səslərin tezliyinə daha çox diqqət yetirir, birincisi isə onun akustikasından asılıdır. Əl çalmaq, fit çalmaq və s. kimi müxtəlif səslər müxtəlif tapşırıqların funksiyasını işə salmaq üçün proqramlaşdırıla bilər.
Şəbəkə texnologiyası: Adından da göründüyü kimi, pultun işləməsi üçün müxtəlif şəbəkələrdən istifadə edir. O, simli ola bilər və ya pult Ethernet şəbəkəsinə qoşula bilər və ya simsiz ola bilər, məsələn, Wi-Fi, Bluetooth və s.
Robotlar necə işləyir?
Robot 3 əsas hissədən ibarət avtonom maşındır. Robotun işləməsi üçün bütün bu hissələr birlikdə işləməlidir.
Nəzarətçi: Robot nəzarətçisi robotun hərəkətlərini və funksiyalarını idarə edir. Geribildirim idarəetmə sistemi olan robot nəzarətçisi, robotun hərəkət edən hissələrinin təqib etməsi üçün əmrlər verən bir kompüter proqramı tərəfindən idarə olunur. Nəzarətçi robot və onun iş mühiti haqqında məlumatları saxlayır və robotu idarə edən proqramları özündə saxlayır;
Ötürücü: Ötürücülər (mühərriklər, porşenlər, tutacaqlar, təkərlər və dişlilər kimi) robotu hərəkət etdirmək, tutmaq, döndərmək və ya qaldırmaq üçün robot elementlərinin mexaniki hərəkətlərini yaratmaq üçün istifadə olunur. Ötürücülərin hərəkət yaratmaq üçün tələb etdiyi enerji mənbəyi adətən elektrik, hidravlik maye və ya pnevmatik təzyiqdir;
Sensorlar: Sensorlar robotlara onun ətrafı və digər vacib məlumatlar haqqında məlumat verir. Aşkarlama elementləri, ölçülər, formalar, obyektlər arasında məsafə, istiqamət və s. ölçüləri və onları emal edən robot nəzarətçisi kimi detalları qidalandırır və sonra robotun müvafiq hərəkətlərini təmin etmək üçün aktuatorları işə salaraq, lazımi dəyişikliklər edərək idarəetmə siqnalını geri göndərir.
Robotları necə idarə edə bilərik?
Robotlar süni intellektdən istifadə etməklə əl ilə idarəetmə, simsiz idarəetmə və tam avtomatik idarəetmə daxil olmaqla müxtəlif üsullarla idarə oluna bilər.
Robot texnikasında idarəetmə sistemi:
Robot idarəetmə sistemi istənilən nəticəni əldə etmək üçün əmrləri idarə edir, robotun müxtəlif hissələrinin hərəkətini və funksiyasını istiqamətləndirir və ya tənzimləyir. İstənilən robot idarəetmə qurğusunun əsas tələbi robot hərəkətinin avtomatik idarə olunmasıdır. Hər robotun bir növ əks əlaqə idarəetmə sistemi olan bir nəzarətçisi var. O, davamlı olaraq sensorlardan oxuyur və istənilən robot davranışına nail olmaq üçün aktuatorlar üçün əmrləri yeniləyir. Robot nəzarətçisi robotun işinin bütün aspektlərini koordinasiya edir və idarə edir. Yüksək performans səviyyəsinə nail olmaq üçün robot idarəetməsi aşağıda izah edildiyi kimi sensor rəyindən istifadə edərək qapalı dövrəli idarəetmə sistemindən istifadə edir.
Əlaqəyə nəzarət sistemi beş əsas komponentdən ibarətdir:
Daxiletmə;
Nəzarət olunan proses;
Çıxış;
Hissedici elementlər;
Nəzarətçi və idarəedici qurğular;
Qapalı dövrə idarəetmə sistemi nədir?
Əks əlaqədən istifadə edən idarəetmə sisteminə qapalı dövrəli idarəetmə sistemi deyilir. Qapalı döngə əks əlaqə nəzarətində nəzarətçi prosesin ölçülmüş çıxış dəyərini istinad və ya təyin nöqtəsi olan istənilən təyin edilmiş dəyərlə müqayisə edir. Çıxış dəyəri istinad dəyəri ilə müqayisə üçün “hissedici elementlər” vasitəsilə geri verilir. Faktiki çıxış dəyəri ilə prosesin arzu olunan təyin edilmiş dəyəri arasındakı fərq “xəta” siqnalıdır. Bu xəta siqnalı nəzarətçiyə ötürülür ki, bu da nəzarət altında olan “prosesə” daxil olan siqnalda lazımi dəyişikliklər edən idarəetmə hərəkətini yaradır ki, prosesin çıxış dəyəri istənilən təyin edilmiş dəyərə çatsın. Robotun hərəkətlərini idarə edən robot nəzarətçisini Robotun beyni hesab etmək olar. Robot idarəetmə sistemi ilə bağlı əsas nəzəriyyə ondan ibarətdir ki, müəyyən məqsədə nail olmaq üçün proqram əmrinə cavab olaraq giriş siqnalı yaradılır və bu, robot elementlərinin mexaniki hərəkətlərini yaratmaq üçün aktuatoru işə salan nəzarətçidən çıxış siqnalı yaradır. İdarəetmə alqoritminin proqramlaşdırılması nə qədər ağıllı olarsa, idarəetmə sistemi bir o qədər etibarlı və səmərəli olar. Robotun hərəkəti və qüvvələri ölçmələri robot nəzarətçisinə göndərən “sensorlar” vasitəsilə ölçülür. Referans təyin nöqtəsindən və sensor rəyindən istifadə edərək, robot nəzarətçisi sistem xətasını azaltmaq və sistemin çıxışını istədiyiniz təyin edilmiş dəyərə qaytarmaq üçün idarəetmə siqnalında tələb olunan dəyişiklikləri edir.
Robot idarəetmə sisteminin əsas növləri hansılardır?
Robot idarəetmənin iki əsas növü var:
Nöqtədən-nöqtəyə nəzarət sistemi: Bu idarəetmə sistemi ilə robot bir hissəni haradan götürəcəyini və həmin hissəni harada tərk edəcəyini bilir. Bu sistem proqramları quraşdırarkən və endirərkən işləyir;
Davamlı yola nəzarət sistemi: Bu idarəetmə sistemi robotun qaynaq və ya rəngləmə kimi müəyyən bir yolu izləməsi lazım olduqda işləyir.
Bir sözlə, robot idarəetmə sistemi əmrləri idarə edir, robotun müxtəlif hissələrinin hərəkətini və funksiyalarını istiqamətləndirir və ya tənzimləyir, həmçinin müəyyən qüvvələr və hərəkətlər toplusunu yerinə yetirir. Qapalı dövrə idarəetmə sistemində, xətanı azaltmaq və sistemin çıxışını sabitləşdirmək üçün faktiki çıxış dəyəri ilə prosesin istənilən təyin edilmiş dəyəri arasındakı fərq olan işə salınan xəta siqnalı robot nəzarətçisinə verilir. Və beləliklə robotun istədiyiniz kimi hərəkət etməsinə nail olursunuz.
Rəqəmsal kompüterlərin ixtirasından sonra alimlər onu “elektron beyin”adlandırdılar. Daha sonra robot yaratmağa başladılar. İlk proqramlaşdırıla bilən robot 1961-ci ildə istehsal olunmuş Unimate idi. Bu robot vasitəsilə qaynar metal əşyaları daşımağ olurdu. Unimate ilk proqramlaşdırıla bilən və avtonom robot idi.
1966-cı ildə Robot Shakey hazırlandı. Robot Shakey özünü necə aparacağı barədə qərar verən ilk ağıllı avtonom robot idi.
İllər keçdikcə kompüterlərin inkişafı robotexkina elmində də bir sıra irələyişlərə səbəb oldu. Alimlər süni intellekt üzrə yeniliklər edərək Shakey robotunu daha da təkminləşdirdilər. Bunun sayəsində daha genış tapşırıqlar edə bildi və üzən uça bilən heyvanların davranışlarını modelləşdirə bilən robotlar yarandı.
İkinci istiqamətdə əsas diqqət insanın üzvlərini təqlid edən süni əzaların yaradılmasına yönəldildi. Zaman keçdikcə alimlər insanabənzər robotların (humanoid) yaradılmasına çalışdılar.
Robototexnika nədir?
Robototexnika insan hərəkətlərini əvəz edən (və ya təkrarlayan) robotlar adlanan maşınlar istehsal edən elm, mühəndislik və texnologiyanın kəsişməsidir. Robot insanlara kömək edə bilən və ya insan hərəkətlərini təqlid edə bilən proqramlaşdırıla bilən maşınların qurulduğu robototexnika sahəsinin məhsuludur. Robotlar əvvəlcə monoton vəzifələrin öhdəsindən gəlmək üçün (konveyerdə avtomobil tikmək kimi) qurulmuşdu, lakin sonradan inkişaf edərək yanğınla mübarizə, evləri təmizləmək və inanılmaz dərəcədə mürəkkəb əməliyyatlara kömək etmək kimi vəzifələri özündə birləşdirdi.
Texnologiya irəlilədikcə robototexnika hesab edilənlərin əhatə dairəsi də genişlənir. 2005-ci ildə bütün robotların 90%-i avtomobil zavodlarında avtomobil hazırlanmasında istifadə olunurdu. Bu robotlar, əsasən, avtomobilin müəyyən hissələrini qaynaq etmək üçün istifadə edilirdi. İndi isə elmin bütün sahələrində robotları görmək olar. Məsələn səhiyyədə, hüquq-mühafizə orqanlarında və yerin dərinliklərində araşdırma aparan müasir robotlara rast gəlmək olar.
Robot texnikası günü-gündən genişlənsə də robot üçün dəyişilməyən bir sıra xüsusiyyətlər var.
Robotlar mexaniki konstruksiyadan ibarətdir. Yəni hər bir robot istifadə olunacağı mühitə uyğun konstruksiyadan hazırlanır.
Robotların idarə olunması üçün onları gücləndirən vasitələrə ehtiyac var. Bunlara da batareyanı misal göstərmək olar.
Robotlara onların görəcəyi işə uyğun kod yazmağ lazmıdır. Kod olmazsa robot sadə dəmir parçasıdır. Yazılmış kod sayəsində robot hansı işi hansı vaxta yerine yetirməli olduğunu bilir.
Proqram təminatının və süni intellektin hər il inkisafı robotların da inkişafına səbəb olur. Şüphəsiz ki, yaxın gələcəkdə robotlar həyatımızda ayrılmaz rol oynayacağlar. Onlar daha ağıllı, daha çevik və enerjiyə daha çox qənaət edəcəklər. Həmçinin, onların istifadə dairəsi artacaq və fabriklərin əsas hissəsi olacaqlar. Robotlar okeanların dərinliklərindən tutmuş kosmosda insanların edə bilmədiyi işlərin öhdəsindən asanlıqla gəlirlər.
Robotların yerinə yetirdikləri vəzifələrə görə müxtəlif ölçüdə ola bilərlər. Belə olan halda da onlar bir-birilərində ölçülərinə, yerinə yetirdikləri funksiyalara görə fərqlənirlər. Ümumi halda isə robotları 5 əsas növə bölürlər.
Əvvəlcədən proqramlana bilən robotlar
İnsanabənzər robotlar
Artan robotlar
Teleoperativ robotlar
Avtonom robotlar
1)Əvvəlcədən proqramlana bilən robotlar: Bu tip robotlar proqram vasitəsilə lazım olan işləri əvvəlcədən bilirlər. Bu robotlar işləyən zaman onların işinə müdaxilə etmək olmur. Əvvəlcədən proqramlaşdırıla bilən robotlara misal olaraq, sənaydə maşın istehsalında və tibbidə istifadə olunan robotları misal göstərmək olar.
Ümumiyyətlə, avtomobil sənayesi ən çox robot istifadə edən sanaye növüdür. Burada istifadə olunan əvvəlcədən proqramlaşdırıla bilən robotlar maşınların qaynağında, boyanmasında istifadə edilir.
Tibbdə istifadə olunan robotlar yüksək dəqiqlik tələb edir. Xərçəng xəstəliyində şişlərin aşkar olunmasında və müalicə olunmasında istifadə olunur. CyberKnife bu tip robotlara aiddir və bu robot sayəsində insan bədəninin lazım olan yerlərinə lazimi dozada radiasiya çatdıraraq müalicə edir.
Bu tip robotların xüsusiyyətlərindən belə nəticəyə gəlmək olar ki, onlar proqram vasitəsilə onlara daxil edilmiş plan üzrə hərəkət edirlər. Yəni bu robotlarla təcrübə apara bilmərik, çünki onlar necə cavab verəcəklərini bilmirlər.
2)İnsanabənzər robotlar: Bu robotlar insana xas olan hərəkətlər edirlər. Bir növ insanı təqlid edirlər. İnsan kimi qaçma, tullanma hər hansı əşyanı bir yerdən digər yerə daşıya bilirlər. İnsanabənzər robotlara Hanson Robotics-in Sophia-nı misal göstərmək olar.
3)Artan robotlar: Artan robotların əsas göstəriciləri onların artan inkişaf etməsidir. Yəni insan imkanlarını artırır və ya hər hansı insan fiziki məhdudludursa, bu robotlar insanın itirdiyi imkanları əvəz edir. Bu tip gücləndirici robotların əksəriyyəti insanın gücünün çatmadığı işləri görən robot protez üzvlər və ya ekzoskeletlərdir. Artan robotlar tibb və sənayedə geniş tədbiq olunur.
Tibb (Protez). Tibbdə ən geniş yayılmış artan robot nümunəsi protezlərdir. Beyinlə birləşdirilə bilən robotlar normal insan qolu kimi xəstənin düşüncələrinə görə hərəkətlərə cavab verir. Bu tip protezlərə nümunə kimi DEKA Qolu göstərmək olar.
Ekzoskeletlər. Bu robotların bir neçə nümayəndəsi var. Ekzoskletlər protezlərdən fərqli olaraq insanların məhdud imkanlarını bərpa etmir. Bu robotlar insanların imkanlarını artırır. Məsələn hər hansı ağır yüklərin daşınmasında istidafə olunurlar.
Bundan əlavə tibbdə də istifadə edilir. Ekzoskeletlərin əsas məqsədi sürət itirmədən insanın imkanlarını artırmaqdır. Bəzi iflic xəstəliklərində, skleroz kimi sinir-əzələ xəstəliklərində xəstə üzərində tədbiq olunur.
Ekzoskeletlərin nümayəndələri:
Raytheon XOS2;
EksoBionics-dən eAyaqlar.
4)Teleoperativ robotlar: Teleoperativ robotlar uzaqdan idarə olunan robotlardır. Bunun nəticəsindı insan uzaq məsafədən təhlükəsiz onu idarə edə bilir. Bu robotlar əsasən qeyri-sabit hava şəraitində, coğrafi şəraiti yaxşı olmayan zamanlarda istifadə olunur. Teleoperativ robotlara misal olaraq BP şirkətinin neft sızması zamanı onun aşkar olunmasında və aradan qaldırılmasında istifadə olunan qayıqları, döyüş meydanında minaların aşkar olunmasında istifadə olunan dronları göstərmək olar. Hər keçən il robotların sayının artması onların daim yenilənməsinə və saylarının artmasına səbəb olur. Bu cür robotlara tibbi sahəsində də xüsusi diqqət yetirilir.
5)Avtonom robotlar: Bu robotlar insan tapşırığından asılı olmayaraq hərəkət edir. Onlarda ətraf aləmi dərk edən sensorlar quraşdırılıb. Avtonom robotlar açıq mühitdə tapşırıqları yerinə yetirmək üçün nəzərdə tutulmuşdur. Quraşdırılmış sensor sayəsində o ətrafdan məlumatı alır,analız edir və vəziyyətə uyğun qərar qəbul edir. Bu tip robotlara Roomba tozsoranını misal göstərmək olar. Avtonom robotların başqa nümayəndələri:
Çəmən budama robotları;
Avtonom dronlar;
Tibbi köməkçi robotlar.
Tibbi köməkçi robotlar hansı xəstənin hansı dərmanı aldığını bilərək ona vaxtında dərman verir.
Robotlar hazırlanarkən bir məqsəd üçün qurulur. Bu vəzifələri yerinə yetirmək üçün bir sıra kompanentlərə ehtiyac var. Məsələn enerji mənbəyi, prosessor. Robotexnika bu elementləri 5 yerə bölür.
Sensorlar;
Aktuatorlar;
Enerji təchizatı;
Nəzarət sistemi;
Effektorlar.
1)Sensorlar: Robota ətraf haqqında məlumat veren elementdir. Bu məlumatlar da robotun davranışlarına təsir edir. Kameralar robota ətraf mühitin rəngini formasını həmçinin obyektlərə qədər olan məsafəni ötürür. Mikrafon robota səsləri tanımağa imkan verir. Bunlardan başqa digər maraqlı funksiyaları yerinə yetiren sensorlar da var. Məsələn İşıq Təsbiti və Aralığı (LİDAR) ətrafın üçölçülü xərtəsini yaradır. Yerin cazibəsini hiss edən akselerometrlər və maqnitometrlər kimi sensorla da var.
2)Aktuatorlar: Cihazı o zaman robot adlandırmaq olar ki, o hərəkət edən gövdəyə malik olsun. Bu hərəkəti də yaradan və ona cavabdeh olan element aktuatordur.
3)Enerji təchizatı: İnsanın işləməsi üçün qidaya ehtiyacı olduğu kimi robotların da gücə ehtiyacı var. Robotların əksəriyyəti batareya ilə işləyirlər. Təhlükəsizlik, həyat dövrü, çəki robot üçün vacib amillərdir.
4)Nəzarət sistemi: Nəzarət sistemi robotun əsas elementlərində biridir. Robota hər hansı işi yerinə yetirmək üçün proqramlaşdırılır. Bu bir növ insan bədəninə sinir vasitəsilə siqnalların göndərilməsinə bənzəyir.
5)Effektorlar: Bu element vasitəsilə robota yerinə yetirməli olduğu işlərə imkan verən xarici elementdir. Sənayedə istifadə olunan robotlar boya çiləyicilər və s. kimi alətlərlə təchiz olunur.
Evdə işdə gündəlik həyatımızda onlarla qarşılaşırıq. Bəs aktuator nədir? Akruator sistemə daxil olan enerjini çevirərək hərəkət yaradır. Aktuatorun yaratdığı hərəkət xətti və fırlanan ola bilər. Xətti ötürücülər xətti hərəkət edirlər. Yəni müstəvi üzərində irəli geriyə hərəkət edirlər. Digər tərəfdən fırlanan aktuatorlar adından da göründüyü kimi fırlanma hərəkəti yaradır. Yəni dairəvi müstəvi üzrə hərəkət edirlər. Xətti ötürücündən fərqli olaraq fırlanan ötürücülər üçün yol məhdudlaşmır.
Ötürücülər pnevmatik, elektrik, hidravlik ola bilərlər. Hansı tip aktuatorun seçilməsi isə görüləcək işdən asılıdır. Nəzarət enerjisi nisbətən aşağı enerjidir. Əsas enerji mənbəyi elektrik cərəyanı, hidravlik maye təzyiqi və ya pnevmatik təzyiq ola bilər. İdarəetmə siqnalını qəbul edərək aktuator mənbənin enerjisini hərəkətə çevirərək cavab verir. Məsələn: mağazaya girdiyimiz zaman qapının avtomatik açılmasına imkan verən aktuatordur.
Bəs aktuator obyekti necə hərəkət etdirir?
Aktuator enerji mənbəyi götürür və ondan nəyisə hərəkət etdirmək üçün istifadə edir. Başqa sözlə aktuator enerji mənbəyini və ya siqnalı fiziki-mexaniki hərəkətə çevirir.
Elektrikli aktuatoru çalışdırmaq üçün elektrik enerjisindən istifadə olunur.
Hidravlik aktuator üçün müxtəlif növlü mayelər istifadə olunur. Onlar ən çox ağır maşınılarda istifadə olunur və çox yüksək təzyiq yaradırlar.
Pnevmatik aktuatorlar isə hava təzyiqindən istifadə edir.
Yəni aktuatorlar enerji mənbəyi olaraq elektrik, maye və hava təzyiqini istifadə edir. Bu enerjilər alınıb hərəkət enerjisinə çevrilir. Robotların əsas elementi sayılan aktuatorların əksəriyyəti fırlanma və ya xətti hərəkət edirlər. Xətti ötürücülər qüvvə ilə fırlanan ötürücülər fırlanma momenti ilə müəyən edilir.
1)Hidravlik aktuator. Ağır yükləri idarə edən robotlardan istifadə olunur. Bu aktuatorlar digər ötürücülərlə müqayisədə çox güc yarada bilirlər. Daha çox sürət, dəqiqlik və sabitliyin tələb olunduğu yerlərdə istifadə olunur. Slindir və porşen quruluşa malikdirlər. Kamera hidravlik maye ilə doldurulur.Mayeyə tətbiq olunan təzyiq pistonu hərəkət etdirir. Hidravlik aktuatorun üstünlükləri:
Sadə və saxlamaq asandır;
Daha az səs-küyə səbəb olur;
Sistemdəki sızmalar asanlıqla aşkar olunur;
Nəzarət etmək asan və dəqiqdir.
Hidravlik aktuatorun çatışmazlıqları:
Düzgün qulluq tələb olunur;
Bahalıdır;
Mayenın sızması ekoloji problem yaradır;
Yanlış istifadə olunmuş maye sistemə zərər verə bilər.
Hidravlik aktuator kimi pistonu hərəkət etdirmək üçün hidravlik mayedən istifadə olunur.Pnevamtik aktuatorlar silindr formasında dizayn edilir.Sıxılmış havanı bir istiqamətdə hərəkət etdirmək üçün bir piston üzərində hərəkət edir.
Pnevmatik aktuatorların üstünlükləri
Ucuzdur;
Təhlükəsiz və istifadəsi asandır;
Təmizdir. Ətraf mühiti daha az çirkləndirir.
Pnevmatik aktuatorların çatışmazlıqları
Vibrasiyaya həssasdır;
Yüksək səs-küyə səbəb olur;
Dəqiq nəzarət tələb edir.
Elektrikli aktuator. Robot texnikasında ən çox istifadə olunan aktuatordur. Elektrik aktuatoru AC/DC ötürücüləri ola bilər.
Elektrikli aktuator üstünlükləri
Maye sızması yoxdur. Nəticədə ətraf mühit üçün təhlükəsi azdır.
Ən yüksək dəqiqlik təklif edir.
Asanlıqla proqramlaşa bilir.
Eektrikli aktuator çatışmazlıqları
Qiyməti daha yüsəkdir;
Bütün mühitlər üçün uyğun deyillər;
Digər aktuatorlarla müqayisədə həddən artıq istiləşmə, aşınmaya məruz qalırlar.